航天科技系列课程之(一)无人机探秘
介绍
📖 第一部分:无人机概述
第一章 无人机的前世今生
1.1 无人机发展历史
1.2 无人机分类与应用
第二章 无人机系统组成
2.1 机体结构
2.2 飞行控制系统
2.3 动力系统
2.4 通信系统
第三章 飞行原理解析
3.1 空气动力学基础
3.2 飞行控制算法
🎮 第二部分:无人机操作
第四章 操作法规与安全
4.1 国内无人机法规
4.2 飞行安全准则
4.3 责任与保险
第五章 遥控器基本操作
5.1 遥控器结构认识
5.2 无人机飞行操控原理
5.3 遥控器基本操作
5.4进阶操作技巧
第六章 Robomaster TT实战
6.1 TT无人机介绍
6.2 基础操作练习
🖥️ 第三部分:无人机仿真
第七章 仿真技术概述
7.1 仿真的意义与价值
7.2 主流仿真软件对比
第八章 Liftoff模拟器详解
8.1 软件安装与配置
8.2 基本操作学习
8.3 进阶训练项目
第九章 仿真与现实的桥梁
9.1 仿真参数调节
9.2 技能迁移训练
💻 第四部分:无人机编程
第十章 编程基础准备
10.1 编程环境搭建
10.2 无人机通信协议
第十一章 自制无人机平台
11.1 硬件平台介绍
11.2 编程接口详解
11.3 开发环境配置
第十二章 基础编程实践
12.1 简单飞行控制
12.2 传感器数据处理
12.3 自动化任务编程
第十三章 高级编程项目
13.1 计算机视觉应用
13.2 人工智能集成
13.3 创新项目开发
本文档使用 MrDoc 发布
-
+
首页
2.2 飞行控制系统
> "飞控系统是无人机的大脑,让机器拥有了飞翔的智慧" --- ## 🧠 飞控板核心功能 ### 💻 飞控系统概述 飞行控制系统(Flight Control System,简称飞控)是无人机的核心控制单元,相当于无人机的"大脑"。它负责处理各种传感器数据,执行飞行控制算法,并输出控制指令给电机,确保无人机能够稳定飞行。 **图:PX开源飞控板** <img src="/media/202507/Pixhawk飞控_1753494774.jpg" alt="飞控板核心组件" width="400"> | 核心功能 | 作用描述 | 技术要求 | 实现方式 | |----------|----------|----------|----------| | 姿态控制 | 保持无人机稳定飞行姿态 | 高精度、快响应 | PID控制算法 | | 位置控制 | 精确控制无人机空间位置 | GPS精度<1m | 卡尔曼滤波 | | 航线规划 | 自主飞行路径规划 | 实时路径优化 | A*算法 | | 安全保护 | 异常情况自动处理 | 故障检测<100ms | 多重冗余设计 | ### 🔧 硬件架构设计 现代飞控系统采用高性能微处理器作为核心,集成多种传感器和通信接口。 **图:飞控系统硬件图**  - **主处理器**:通常采用ARM Cortex-M4/M7系列,运行频率168-480MHz - **协处理器**:专门处理传感器数据融合和实时控制 - **存储系统**:Flash存储程序,SRAM存储运行数据 - **通信接口**:UART、SPI、I2C、CAN等多种通信协议 > "一个优秀的飞控系统,就像一位经验丰富的飞行员,能够在复杂环境中做出正确判断" ### ⚡ 实时控制特性 飞控系统必须具备实时控制能力,确保在各种飞行状态下都能快速响应。 | 控制回路 | 更新频率 | 响应时间 | 精度要求 | |----------|----------|----------|----------| | 姿态内环 | 1000Hz | <1ms | ±0.1° | | 位置外环 | 100Hz | <10ms | ±10cm | | 航线控制 | 10Hz | <100ms | ±1m | | 安全监控 | 50Hz | <20ms | 100%可靠 | --- ## 📡 传感器组合:陀螺仪、加速度计、磁力计 ### 🌀 陀螺仪(Gyroscope) 陀螺仪是测量无人机角速度的关键传感器,为姿态控制提供基础数据。 **图:简单陀螺仪结构** 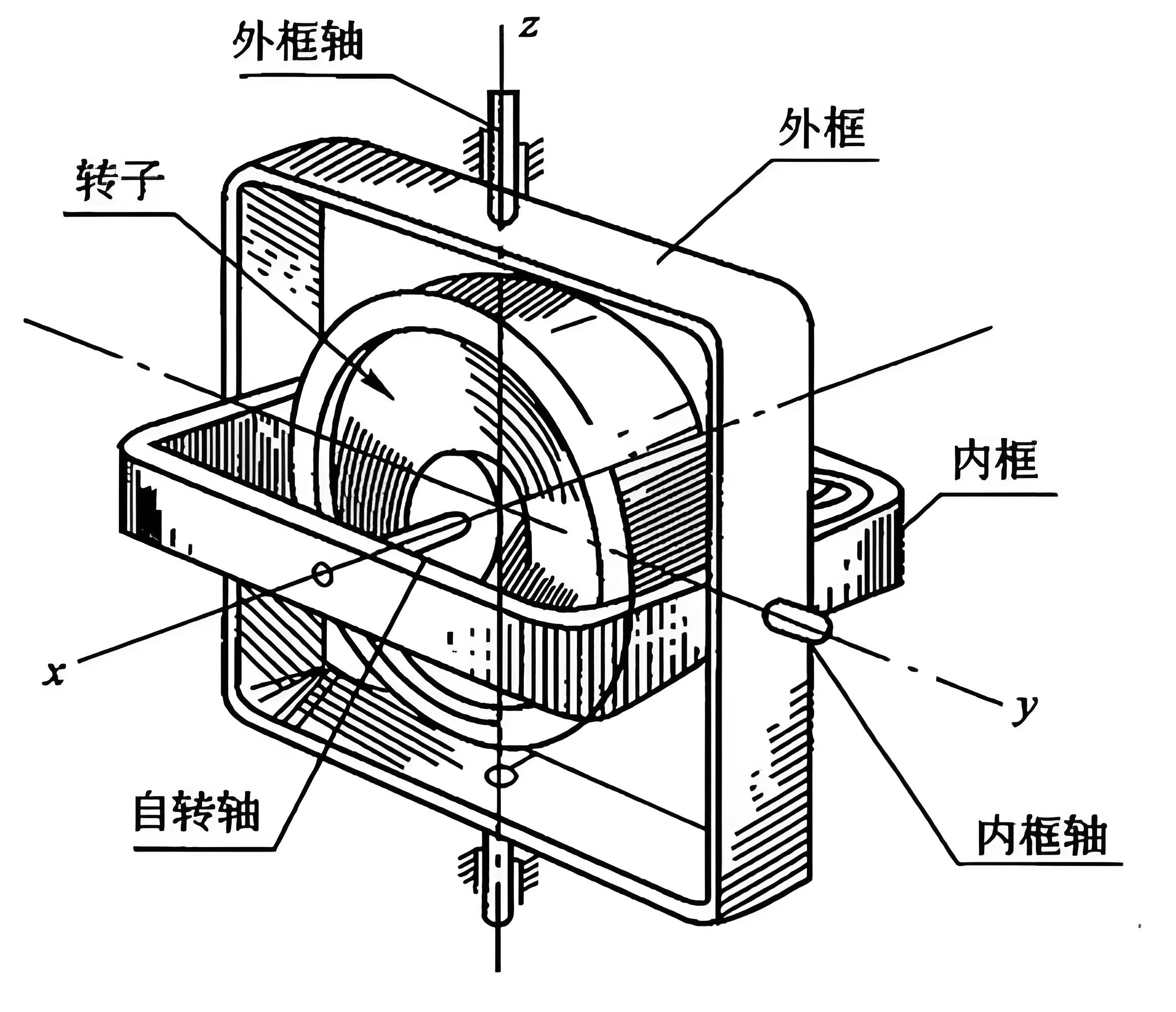 **工作原理**: - 基于科里奥利效应,测量物体绕三个轴的角速度 - 输出Roll(横滚)、Pitch(俯仰)、Yaw(偏航)三轴角速度 - 通过积分计算得到姿态角度变化 | 技术参数 | 典型值 | 单位 | 说明 | |----------|--------|------|------| | 测量范围 | ±2000 | °/s | 满足各种飞行动作需求 | | 分辨率 | 0.01 | °/s | 高精度测量 | | 零偏稳定性 | <10 | °/h | 长期稳定性指标 | | 带宽 | >100 | Hz | 快速响应能力 | ### 📐 加速度计(Accelerometer) 加速度计测量无人机在三个轴向的加速度,用于姿态解算和运动控制。 **图:加速度计原理图** 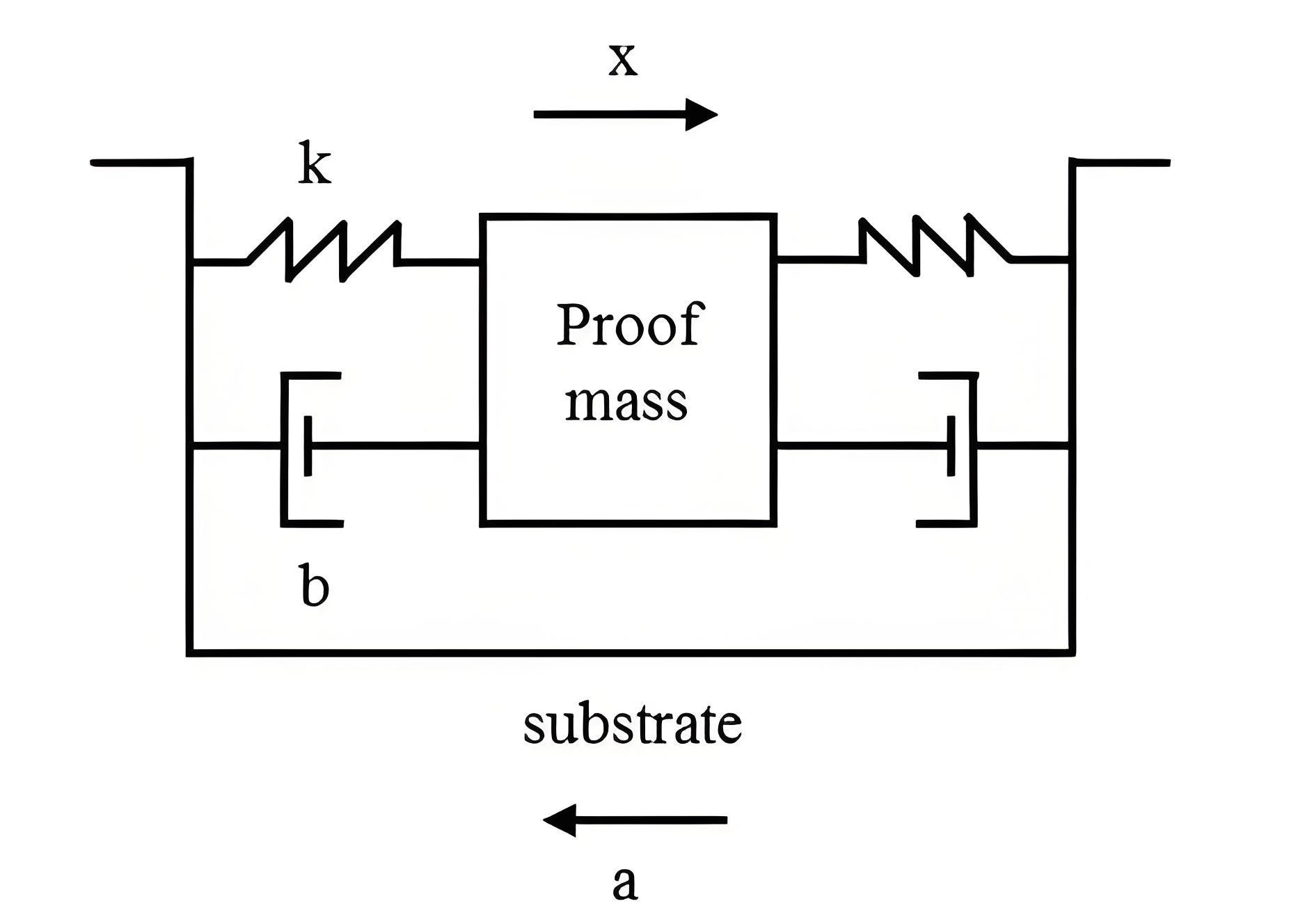 **主要功能**: - 测量重力加速度分量,计算倾斜角度 - 检测无人机的线性加速度 - 与陀螺仪数据融合,提高姿态解算精度 > "加速度计就像无人机的内耳,感知重力方向和运动状态" | 应用场景 | 测量内容 | 精度要求 | 典型应用 | |----------|----------|----------|----------| | 姿态解算 | 重力分量 | ±0.1° | 水平保持 | | 运动检测 | 线性加速度 | ±0.1m/s² | 位置控制 | | 振动监测 | 高频振动 | ±0.01g | 故障诊断 | | 碰撞检测 | 冲击加速度 | ±10g | 安全保护 | ### 🧭 磁力计(Magnetometer) 磁力计通过测量地球磁场来确定无人机的航向角,是导航系统的重要组成部分。 **图:地球磁场** 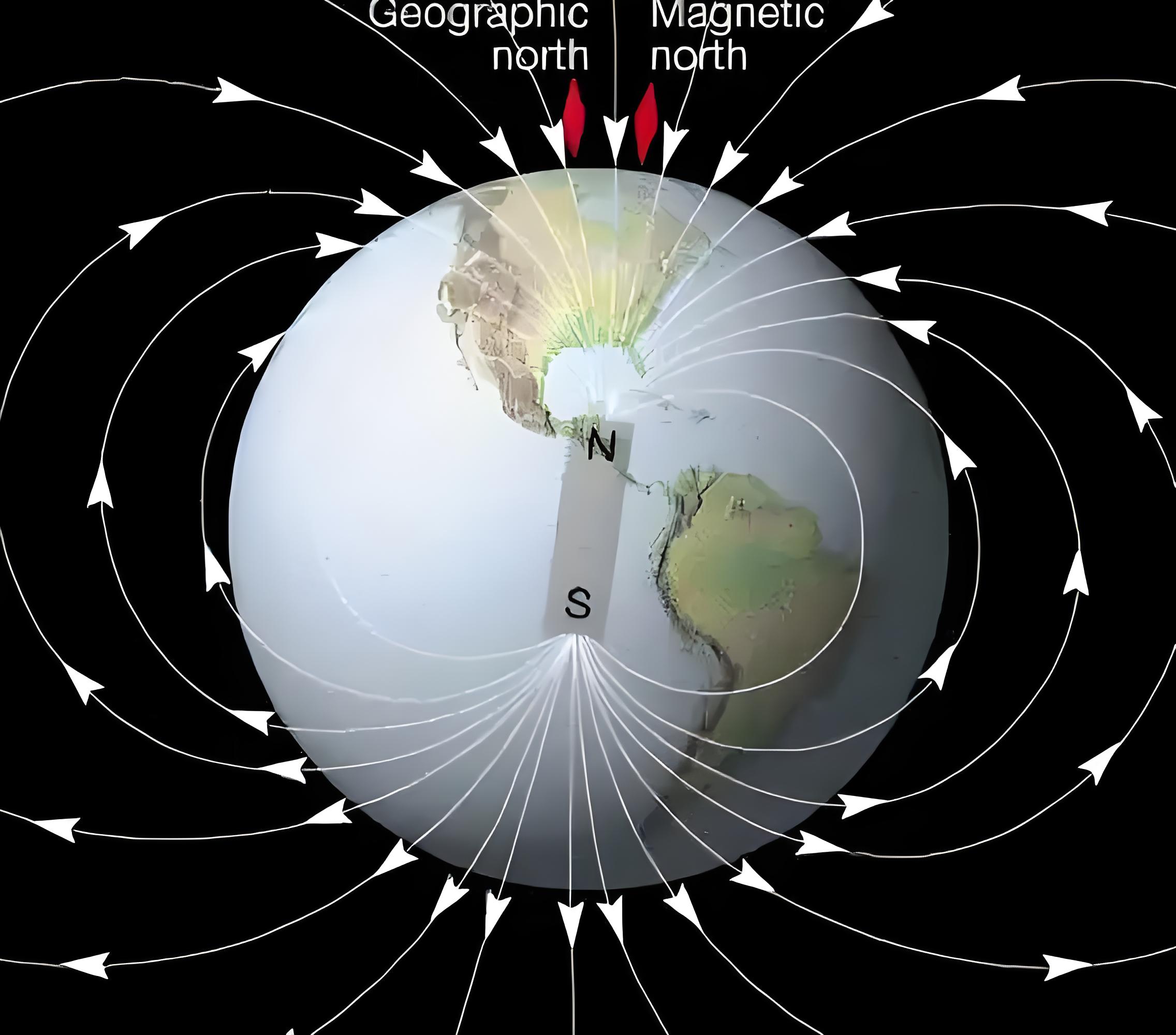 **技术特点**: - 测量地球磁场在三个轴向的分量 - 计算磁北方向,提供航向参考 - 需要定期校准以消除硬铁和软铁干扰 ### 🔄 传感器数据融合 单一传感器都有其局限性,需要通过数据融合算法获得准确可靠的姿态信息。 **图:多源信息融合** 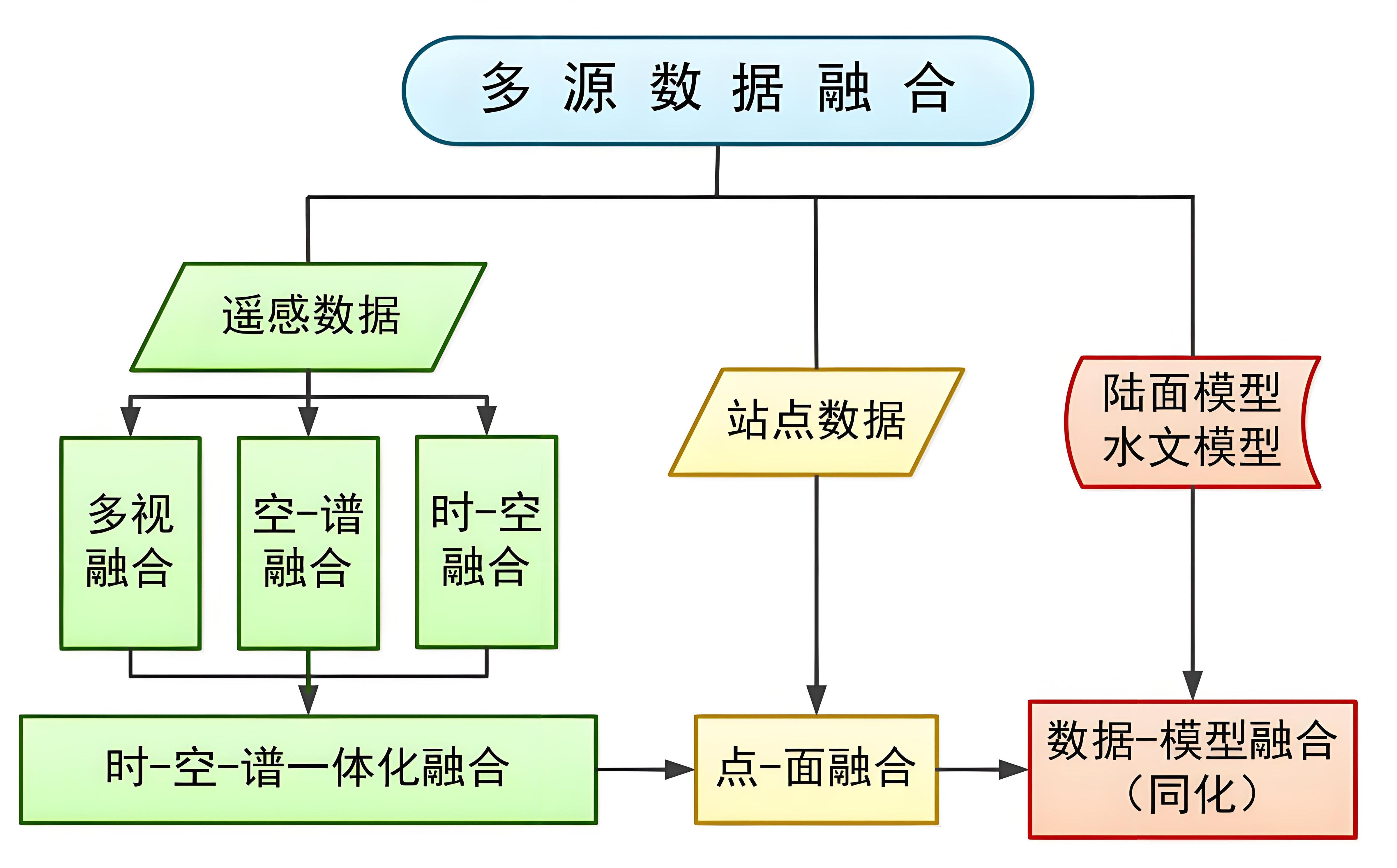 | 融合算法 | 优势 | 劣势 | 适用场景 | |----------|------|------|----------| | 互补滤波 | 计算简单,实时性好 | 精度有限 | 入门级飞控 | | 卡尔曼滤波 | 精度高,理论完善 | 计算复杂 | 专业级飞控 | | 粒子滤波 | 适应非线性系统 | 计算量大 | 高端应用 | | 扩展卡尔曼滤波 | 平衡精度与复杂度 | 参数调节复杂 | 主流选择 | --- ## 🛰️ GPS定位系统 ### 📍 GPS基础原理 GPS(Global Positioning System)为无人机提供全球定位服务,是实现自主飞行的关键技术。 **图:卫星定位原理** 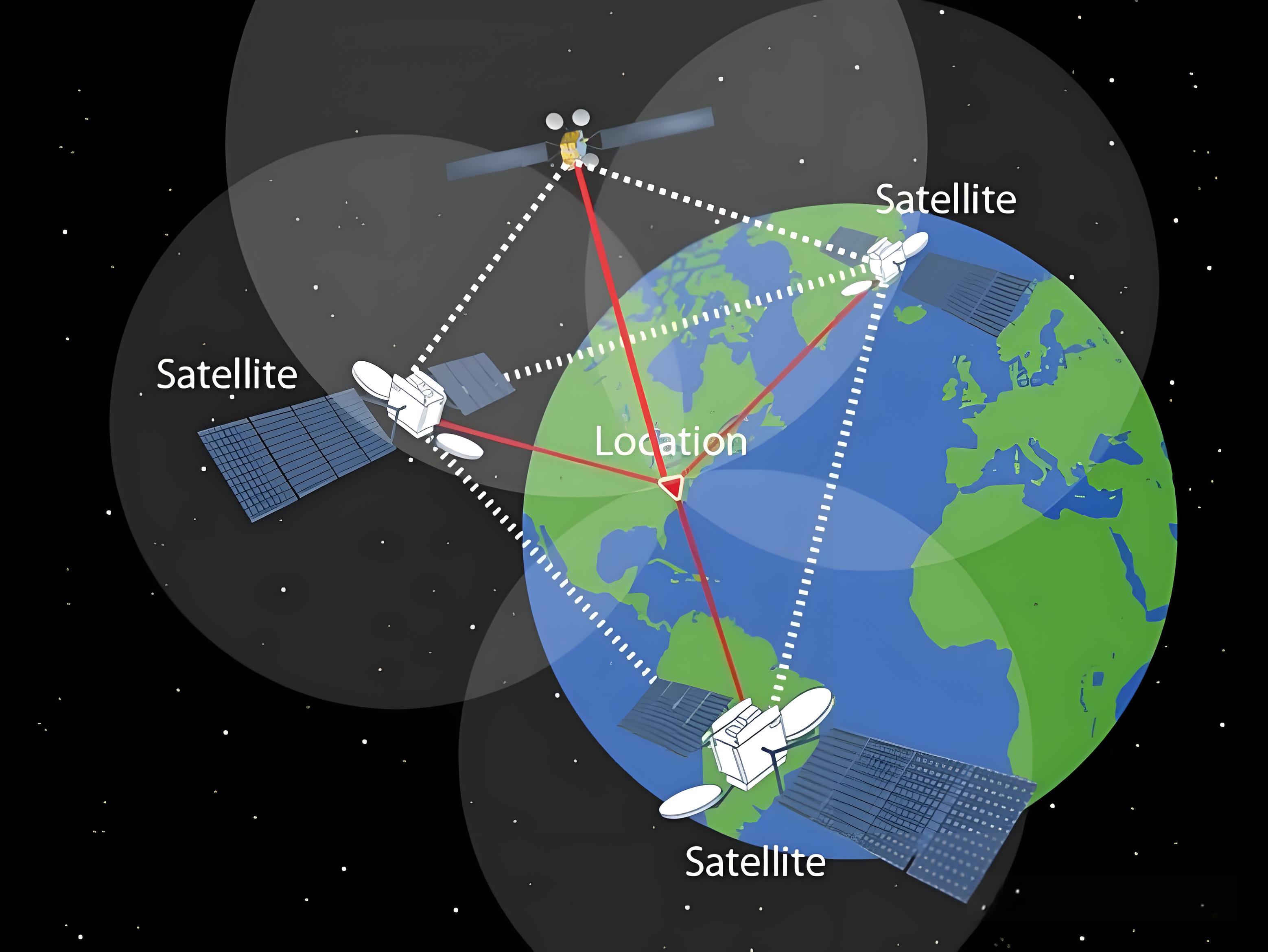 **定位原理**: - 接收至少4颗卫星信号 - 通过测量信号传播时间计算距离 - 利用三角定位算法确定位置 - 第4颗卫星用于时钟同步 | GPS参数 | 标准GPS | 差分GPS | RTK-GPS | |---------|---------|---------|----------| | 定位精度 | 3-5m | 1-3m | 1-10cm | | 初始化时间 | 30-60s | 60-120s | 10-30s | | 更新频率 | 1-10Hz | 1-10Hz | 1-20Hz | | 成本 | 低 | 中 | 高 | ### 🎯 高精度定位技术 为了满足精密飞行控制需求,现代无人机采用多种高精度定位技术。 **图:RTK定位系统** 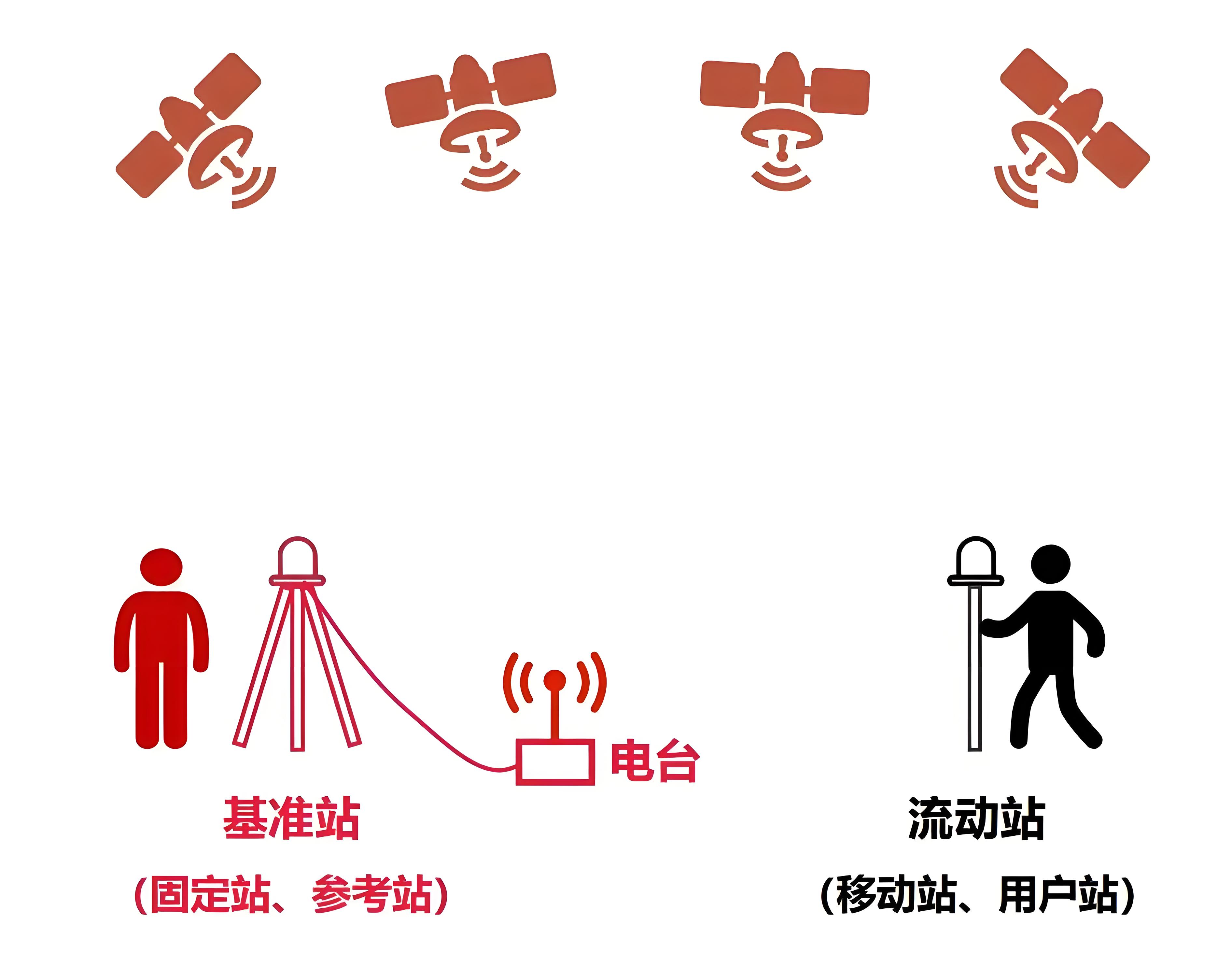 - **RTK技术**:实时动态载波相位差分技术,精度可达厘米级 - **多星座接收**:同时接收GPS、GLONASS、北斗、Galileo等卫星信号 - **惯性导航辅助**:GPS信号丢失时提供短期导航能力 > "高精度定位就像给无人机装上了精确的眼睛,让它知道自己在哪里,要去哪里" ### 🚫 GPS拒止环境应对 在GPS信号受阻或干扰的环境中,需要采用替代定位方案。 **图:多源定位融合**  | 替代技术 | 工作原理 | 精度范围 | 适用环境 | |----------|----------|----------|----------| | 视觉SLAM | 相机+算法 | 10cm-1m | 室内、有纹理环境 | | 激光SLAM | 激光雷达 | 1-10cm | 室内、复杂环境 | | UWB定位 | 超宽带测距 | 10-30cm | 室内、小范围 | | 光流定位 | 光学传感器 | 50cm-2m | 低空、有纹理地面 | --- ## 🔧 飞控系统集成与调试 ### ⚙️ 硬件集成要点 飞控系统的硬件集成需要考虑电磁兼容、机械安装、散热等多个方面。 - **安装位置**:尽量靠近无人机重心,减少振动影响 - **减震设计**:使用减震胶垫,隔离机械振动 - **电磁屏蔽**:避免电机、电调等设备的电磁干扰 - **散热考虑**:确保良好的空气流通,避免过热 ### 📊 参数调试流程 飞控参数调试是确保无人机稳定飞行的关键步骤。 | 调试阶段 | 主要参数 | 调试目标 | 注意事项 | |----------|----------|----------|----------| | 基础设置 | 机架类型、电机方向 | 正确识别硬件配置 | 仔细核对连接 | | 传感器校准 | 加速度计、磁力计 | 消除安装误差 | 远离磁干扰源 | | 姿态调试 | PID参数 | 快速稳定响应 | 逐步调整,安全第一 | | 位置调试 | GPS、高度参数 | 精确位置保持 | 开阔场地测试 | ### 🛡️ 安全保护机制 现代飞控系统集成了多重安全保护机制,确保飞行安全。 **图:地理围栏系统**  > "安全保护机制就像汽车的安全气囊,平时不起眼,关键时刻能救命" - **失控保护**:遥控信号丢失时自动返航或降落 - **低电压保护**:电池电压过低时强制降落 - **地理围栏**:限制飞行区域,防止误入禁飞区 - **姿态保护**:防止过度倾斜导致失控 --- ## 🚀 先进飞控技术展望 ### 🤖 人工智能集成 未来的飞控系统将更多地集成人工智能技术,实现更智能的飞行控制。 - **机器学习优化**:通过学习优化控制参数 - **环境感知**:智能识别和避开障碍物 - **任务规划**:自主制定最优飞行路径 - **故障预测**:提前预警潜在故障 ### 🌐 集群协同控制 多机协同飞行是未来无人机应用的重要发展方向。 **图:无人机集群**  | 技术挑战 | 解决方案 | 应用前景 | |----------|----------|----------| | 通信协调 | 分布式通信协议 | 大规模编队表演 | | 碰撞避免 | 实时路径规划 | 搜救任务协同 | | 任务分配 | 智能调度算法 | 物流配送网络 | | 故障处理 | 自适应重构 | 军事作战应用 | --- ## 🤔 思考与讨论 1. 为什么飞控系统需要多种传感器?单一传感器有什么局限性? 2. 在GPS信号不好的环境中,无人机如何实现精确定位? 3. 你认为未来的飞控系统还会集成哪些新技术? 4. 如何平衡飞控系统的性能、成本和可靠性? --- <center> <a href="../../doc/11"> <button style="background: linear-gradient(135deg, #6e8efb, #a777e3); border: none; color: white; padding: 15px 32px; text-align: center; text-decoration: none; display: inline-block; font-size: 16px; margin: 4px 2px; cursor: pointer; border-radius: 12px; box-shadow: 0 4px 8px rgba(0,0,0,0.1);">🚀 继续探索第2.3节:动力系统 🚀</button> </a> </center>
jiangkai
2025年7月26日 19:34
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码