航天科技系列课程之(一)无人机探秘
介绍
📖 第一部分:无人机概述
第一章 无人机的前世今生
1.1 无人机发展历史
1.2 无人机分类与应用
第二章 无人机系统组成
2.1 机体结构
2.2 飞行控制系统
2.3 动力系统
2.4 通信系统
第三章 飞行原理解析
3.1 空气动力学基础
3.2 飞行控制算法
🎮 第二部分:无人机操作
第四章 操作法规与安全
4.1 国内无人机法规
4.2 飞行安全准则
4.3 责任与保险
第五章 遥控器基本操作
5.1 遥控器结构认识
5.2 无人机飞行操控原理
5.3 遥控器基本操作
5.4进阶操作技巧
第六章 Robomaster TT实战
6.1 TT无人机介绍
6.2 基础操作练习
🖥️ 第三部分:无人机仿真
第七章 仿真技术概述
7.1 仿真的意义与价值
7.2 主流仿真软件对比
第八章 Liftoff模拟器详解
8.1 软件安装与配置
8.2 基本操作学习
8.3 进阶训练项目
第九章 仿真与现实的桥梁
9.1 仿真参数调节
9.2 技能迁移训练
💻 第四部分:无人机编程
第十章 编程基础准备
10.1 编程环境搭建
10.2 无人机通信协议
第十一章 自制无人机平台
11.1 硬件平台介绍
11.2 编程接口详解
11.3 开发环境配置
第十二章 基础编程实践
12.1 简单飞行控制
12.2 传感器数据处理
12.3 自动化任务编程
第十三章 高级编程项目
13.1 计算机视觉应用
13.2 人工智能集成
13.3 创新项目开发
本文档使用 MrDoc 发布
-
+
首页
6.1 TT无人机介绍
> "TT不仅是一架无人机,更是一个会飞的学习平台" --- ## 🛠️ 硬件配置与特点 ### 📋 核心硬件参数 Robomaster TT是大疆创新专为教育市场打造的编程无人机,基于Tello EDU平台深度定制,集成了丰富的教育功能和编程接口。 **图:Robomaster TT整体外观** 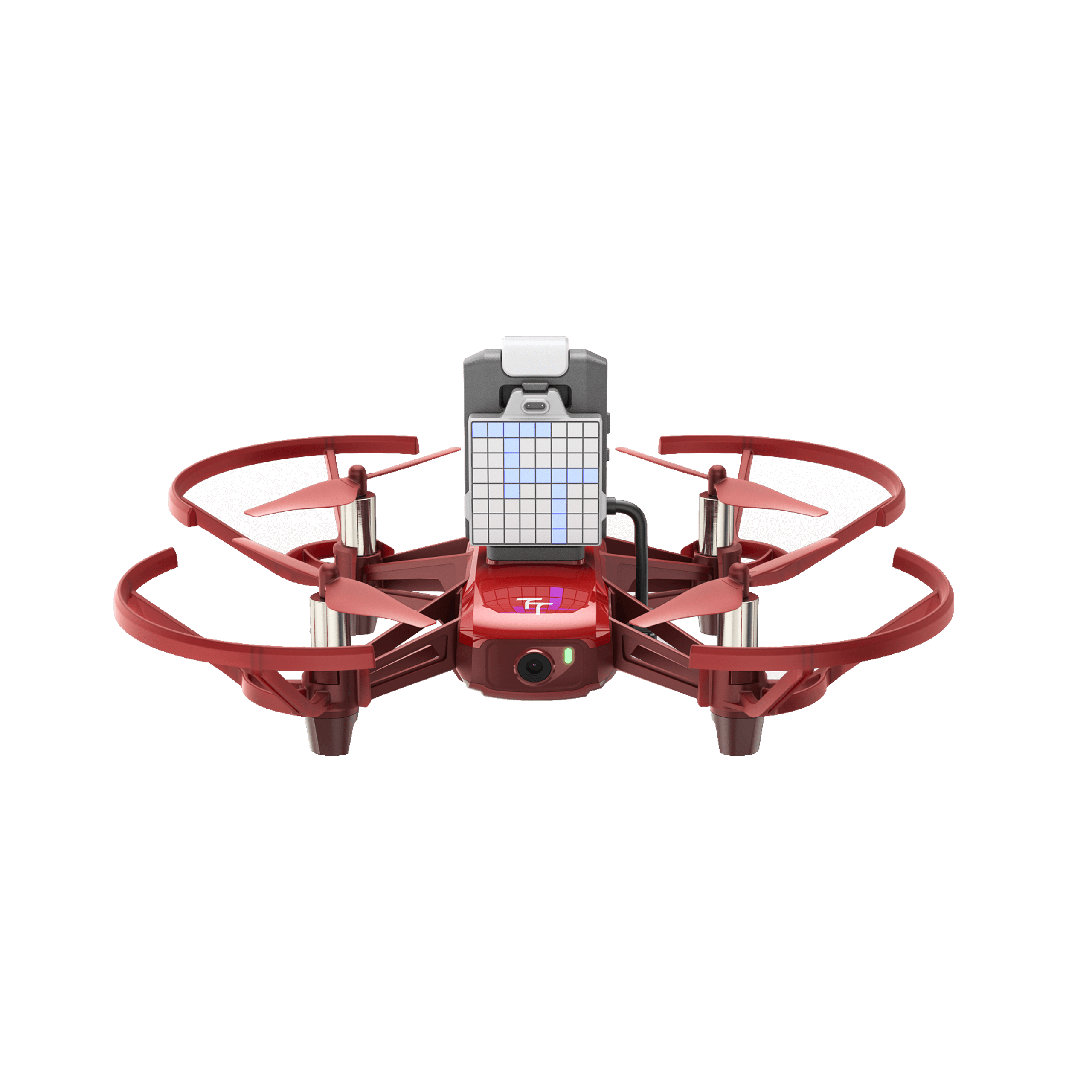 | 硬件模块 | 具体配置 | 技术参数 | 功能特点 | |----------|----------|----------|----------| | 飞行控制器 | 大疆定制飞控 | 三轴陀螺仪+加速度计 | 稳定悬停,精准控制 | | 视觉系统 | 前置500万像素相机 | 2592×1936分辨率 | 实时图传,拍照录像 | | 测距系统 | 红外TOF传感器 | 有效距离0.1-8米 | 定高悬停,避障检测 | | 动力系统 | 无刷电机×4 | 最大飞行速度8m/s | 低噪音,高效率 | | 电池系统 | 1100mAh锂电池 | 飞行时间13分钟 | 可更换,USB充电 | | 通信模块 | 2.4GHz WiFi | 最大控制距离100米 | 低延迟,稳定连接 | ### 🎯 结构设计亮点 TT采用了经典的四旋翼布局,但在细节上进行了多项教育优化设计。 **图:TT结构分解图**  - **防护框架**:全包围螺旋桨护罩,确保室内飞行安全 - **模块化设计**:电池、螺旋桨可快速更换,便于维护 - **LED指示灯**:RGB彩色LED,支持编程控制显示效果 - **扩展接口**:micro USB接口,支持固件更新和数据传输 ### 📏 尺寸与重量 | 参数 | 数值 | 说明 | |------|------|------| | 展开尺寸 | 98×92.5×41mm | 包含螺旋桨护罩 | | 折叠尺寸 | 84×84×41mm | 便于收纳携带 | | 起飞重量 | 87g | 符合多数国家免注册标准 | | 最大载重 | 20g | 可搭载小型传感器模块 | --- ## 🎓 教育版功能特色 ### 💡 专为学习优化 Robomaster TT不仅保持了消费级无人机的易用性,更针对教育场景增加了大量实用功能。 **图:TT教育编程界面展示** 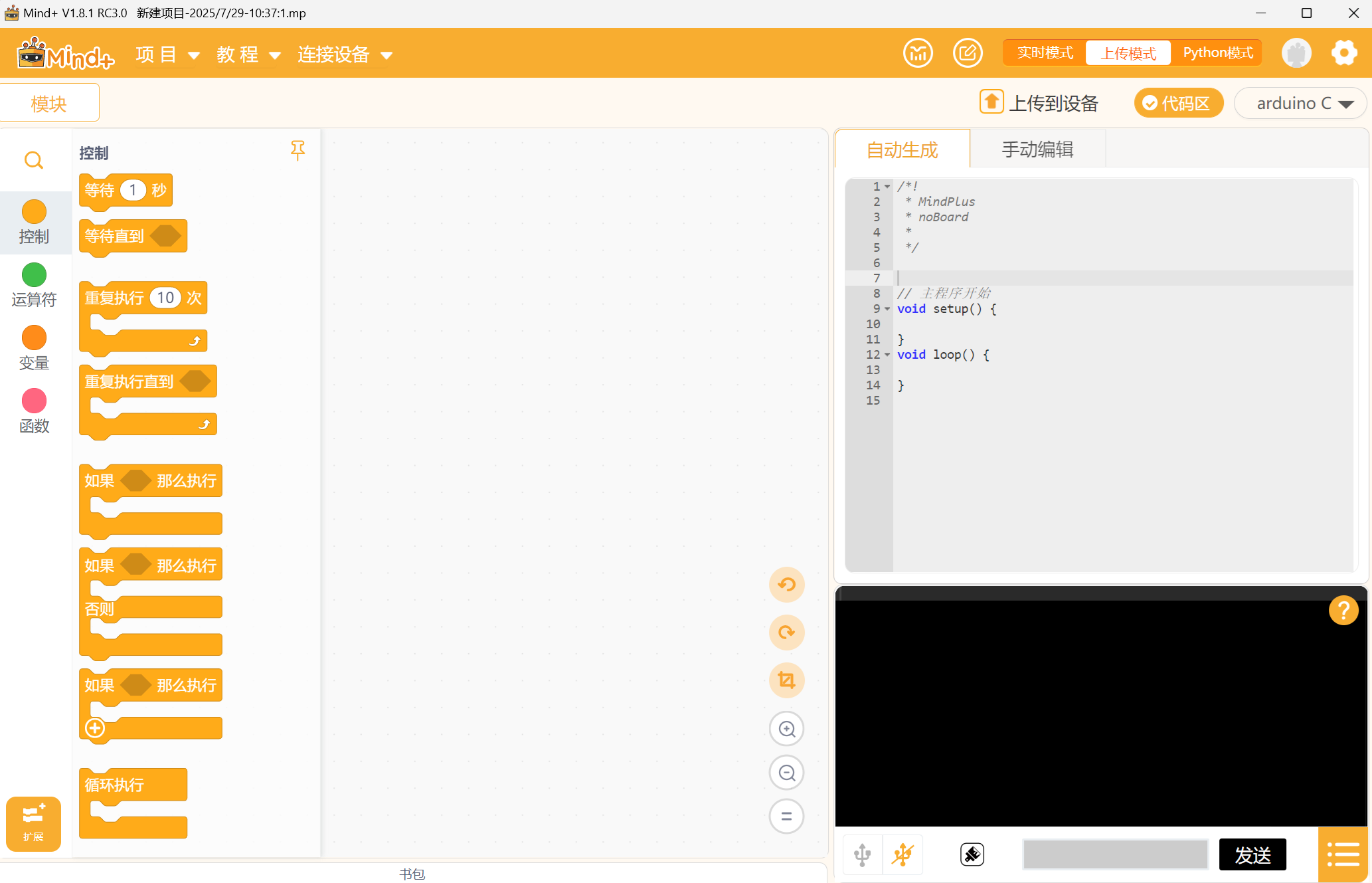 ### 🎮 多模式操作体验 | 操作模式 | 适用场景 | 控制方式 | 学习价值 | |----------|----------|----------|----------| | 手动模式 | 基础飞行训练 | APP虚拟摇杆 | 培养空间感知能力 | | 编程模式 | 算法学习 | 图形化/代码编程 | 逻辑思维和编程技能 | | 编队模式 | 群体协作 | 多机同步控制 | 团队配合和系统思维 | | 挑战模式 | 竞技比赛 | 任务导向操作 | 解决问题能力 | --- ## 💻 编程接口说明 ### 🧩 图形化编程接口 TT支持Scratch图形化编程,让零基础的学生也能快速上手。 **图:Scratch编程界面** 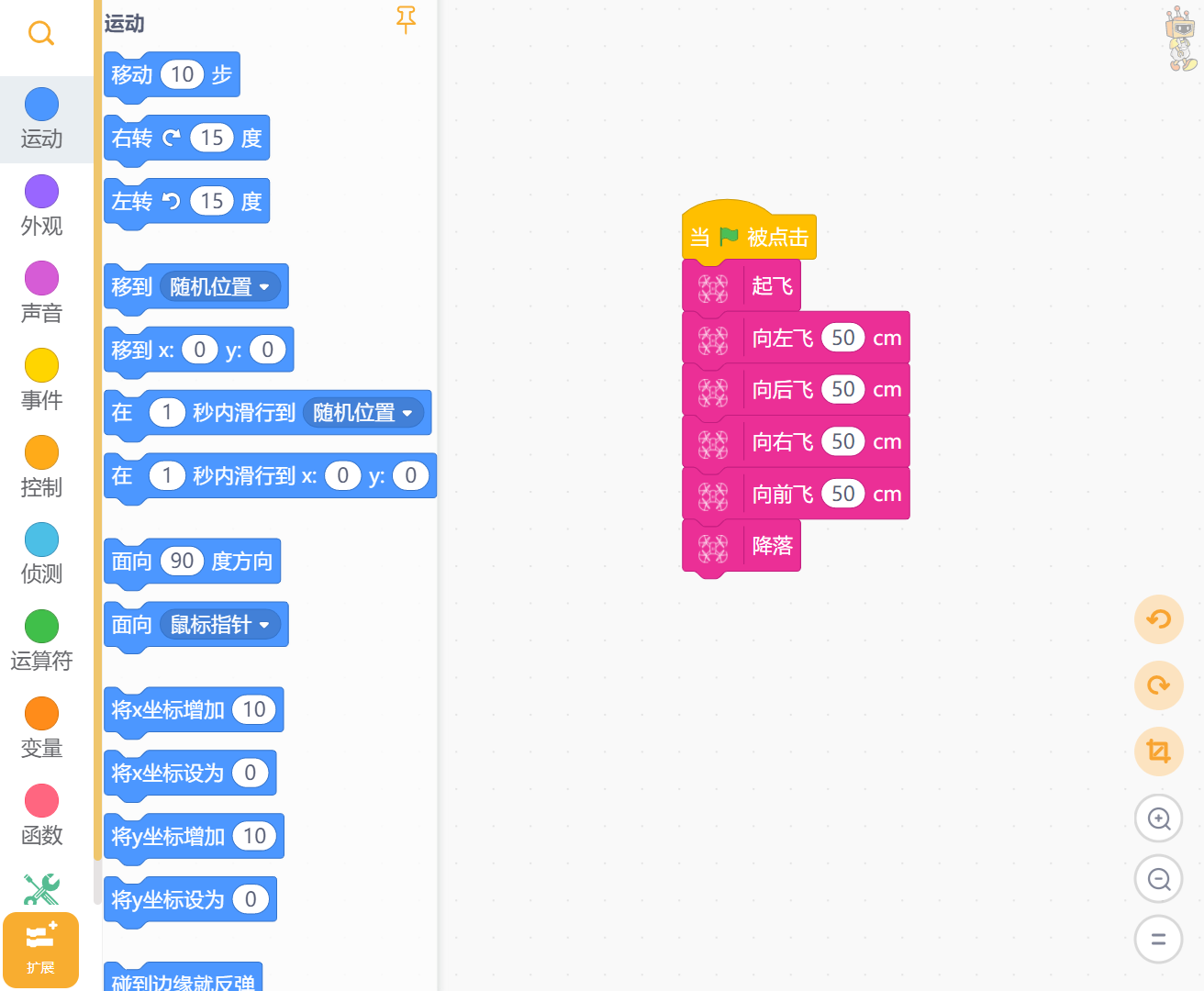 #### 基础控制模块 | 模块类别 | 功能指令 | 参数说明 | 使用示例 | |----------|----------|----------|----------| | 起飞降落 | `起飞()` | 无参数 | 自动起飞到1.2米高度 | | 方向控制 | `向前飞行(距离cm)` | 1-500cm | 向前飞行指定距离 | | 旋转控制 | `顺时针旋转(角度°)` | 1-360° | 按指定角度旋转 | | 高度控制 | `上升(高度cm)` | 20-500cm | 垂直上升指定高度 | #### 高级功能模块 ``` 当绿旗被点击 起飞 等待 3 秒 重复执行 4 次 向前飞行 100 cm 顺时针旋转 90 度 结束 降落 ``` ### 🐍 Python SDK接口 对于有一定编程基础的学生,TT提供了完整的Python SDK支持。 **图:Python编程环境**  #### 基础API示例 ```python from robomaster import robot import time # 初始化无人机 drone = robot.Drone() drone.initialize() # 起飞 drone.flight.takeoff().wait_for_completed() # 画正方形飞行 for i in range(4): drone.flight.forward(distance=100).wait_for_completed() drone.flight.rotate(angle=90).wait_for_completed() # 降落 drone.flight.land().wait_for_completed() drone.close() ``` #### 传感器数据读取 | 传感器类型 | API方法 | 返回值范围 | 数据用途 | |------------|----------|------------|----------| | 高度计 | `get_height()` | 0-300cm | 飞行高度监控 | | 电池电量 | `get_battery()` | 0-100% | 续航时间管理 | | 飞行时间 | `get_flight_time()` | 0-900s | 任务时间控制 | | 飞行速度 | `get_speed()` | 0-800cm/s | 运动状态监测 | ### 🔄 多机协同编程 TT支持最多4架无人机同时编程控制,实现复杂的编队飞行。 #### 编队飞行示例 ```python import asyncio from robomaster import robot async def formation_flight(): # 创建无人机群 swarm = robot.Swarm() await swarm.initialize(['192.168.10.1', '192.168.10.2', '192.168.10.3', '192.168.10.4']) # 同步起飞 await swarm.takeoff() # 编队变换 await swarm.formation_square(size=100) await asyncio.sleep(3) await swarm.formation_triangle(size=150) # 同步降落 await swarm.land() asyncio.run(formation_flight()) ``` --- ## 🛡️ 安全保护机制 ### ⚠️ 多重安全保障 TT内置了完善的安全保护机制,确保学习过程中的安全性。 | 保护机制 | 触发条件 | 保护措施 | 用户提示 | |----------|----------|----------|----------| | 低电量保护 | 电量<20% | 强制降落 | APP语音提醒 | | 失控保护 | 信号丢失3秒 | 自动返航 | 指示灯闪烁 | | 地理围栏 | 超出设定范围 | 悬停等待 | 屏幕警告 | | 碰撞保护 | 检测到障碍 | 自动停止 | 震动提示 | ### 🚨 应急处理流程 1. **紧急停止**:任何时刻按下APP中的急停按钮 2. **手动接管**:切换到手动模式,立即获得控制权 3. **一键返航**:点击返航按钮,自动飞回起飞点 4. **强制降落**:在紧急情况下执行安全降落 --- ## 📋 技术规格总览 | 分类 | 项目 | 参数 | |---|---|---| | **飞行性能** | 最大飞行速度 | 8 m/s (28.8 km/h) | | | 最大上升/下降速度 | 3 m/s | | | 最大飞行海拔高度 | 30米 (软件限制) | | | 最长飞行时间 | 13分钟 | | | 最长悬停时间 | 10分钟 | | | 工作环境温度 | 0°C 至 40°C | | **相机参数** | 传感器 | 1/4英寸 CMOS | | | 镜头 | FOV 82.6° | | | 图片分辨率 | 5MP (2592×1936) | | | 图片格式 | JPG | | | 视频分辨率 | HD720P (1280×720) 30fps | | | 视频格式 | MP4 | | **机身规格** | 起飞重量 | 87g (含电池和螺旋桨) | | | 尺寸 | 98 × 92.5 × 41 mm | | | 螺旋桨尺寸 | 3英寸 | | **电池** | 类型 | 可更换式锂离子聚合物电池 (Lipo 1S) | | | 容量 | 1100 mAh | | | 电压 | 3.8 V | | | 能量 | 4.18 Wh | | **连接与控制** | 通信方式 | 2.4 GHz Wi-Fi | | | 最大控制距离 | 100米 (开阔无遮挡环境) | | | 支持的编程语言 | Scratch, Python, Swift | | **传感器** | 定位系统 | 视觉定位 + 红外定高 | | | 红外传感器 | ToF (Time of Flight) 测距 | --- ## 🤔 思考与讨论 1. **安全与易用**:Robomaster TT在设计上如何平衡飞行安全与编程教育的易用性?哪些设计是你认为最巧妙的? 2. **功能拓展**:除了官方提供的传感器和模块,你能想象TT还可以搭载哪些有趣的第三方模块来完成更复杂的任务吗? 3. **编程与实践**:对比图形化编程和Python编程,你认为它们分别适合什么样的学习者和学习阶段?如果让你设计一个TT的编程挑战项目,你会设计一个什么样的任务? 4. **多机协同的潜力**:单架无人机和无人机编队在应用上有什么本质区别?除了编队表演,你还能想到哪些多机协同的应用场景? --- <center> <a href="../../doc/27"> <button style="background: linear-gradient(135deg, #6e8efb, #a777e3); border: none; color: white; padding: 15px 32px; text-align: center; text-decoration: none; display: inline-block; font-size: 16px; margin: 4px 2px; cursor: pointer; border-radius: 12px; box-shadow: 0 4px 8px rgba(0,0,0,0.1);">🚀 继续探索第6.2节:基础操作练习 🚀</button> </a> </center>
jiangkai
2025年7月29日 10:57
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码