航天科技系列课程之(一)无人机探秘
介绍
📖 第一部分:无人机概述
第一章 无人机的前世今生
1.1 无人机发展历史
1.2 无人机分类与应用
第二章 无人机系统组成
2.1 机体结构
2.2 飞行控制系统
2.3 动力系统
2.4 通信系统
第三章 飞行原理解析
3.1 空气动力学基础
3.2 飞行控制算法
🎮 第二部分:无人机操作
第四章 操作法规与安全
4.1 国内无人机法规
4.2 飞行安全准则
4.3 责任与保险
第五章 遥控器基本操作
5.1 遥控器结构认识
5.2 无人机飞行操控原理
5.3 遥控器基本操作
5.4进阶操作技巧
第六章 Robomaster TT实战
6.1 TT无人机介绍
6.2 基础操作练习
🖥️ 第三部分:无人机仿真
第七章 仿真技术概述
7.1 仿真的意义与价值
7.2 主流仿真软件对比
第八章 Liftoff模拟器详解
8.1 软件安装与配置
8.2 基本操作学习
8.3 进阶训练项目
第九章 仿真与现实的桥梁
9.1 仿真参数调节
9.2 技能迁移训练
💻 第四部分:无人机编程
第十章 编程基础准备
10.1 编程环境搭建
10.2 无人机通信协议
第十一章 自制无人机平台
11.1 硬件平台介绍
11.2 编程接口详解
11.3 开发环境配置
第十二章 基础编程实践
12.1 简单飞行控制
12.2 传感器数据处理
12.3 自动化任务编程
第十三章 高级编程项目
13.1 计算机视觉应用
13.2 人工智能集成
13.3 创新项目开发
本文档使用 MrDoc 发布
-
+
首页
2.3 动力系统
> "动力系统是无人机的心脏,为飞翔提供源源不断的能量" --- ## 🔋 电池技术与续航 ### ⚡ 锂电池基础知识 锂聚合物电池(LiPo)是现代无人机的主要动力源,具有能量密度高、重量轻、放电能力强等优点。理解电池的基本特性对于优化无人机性能至关重要。 **图:锂聚合物电池结构** 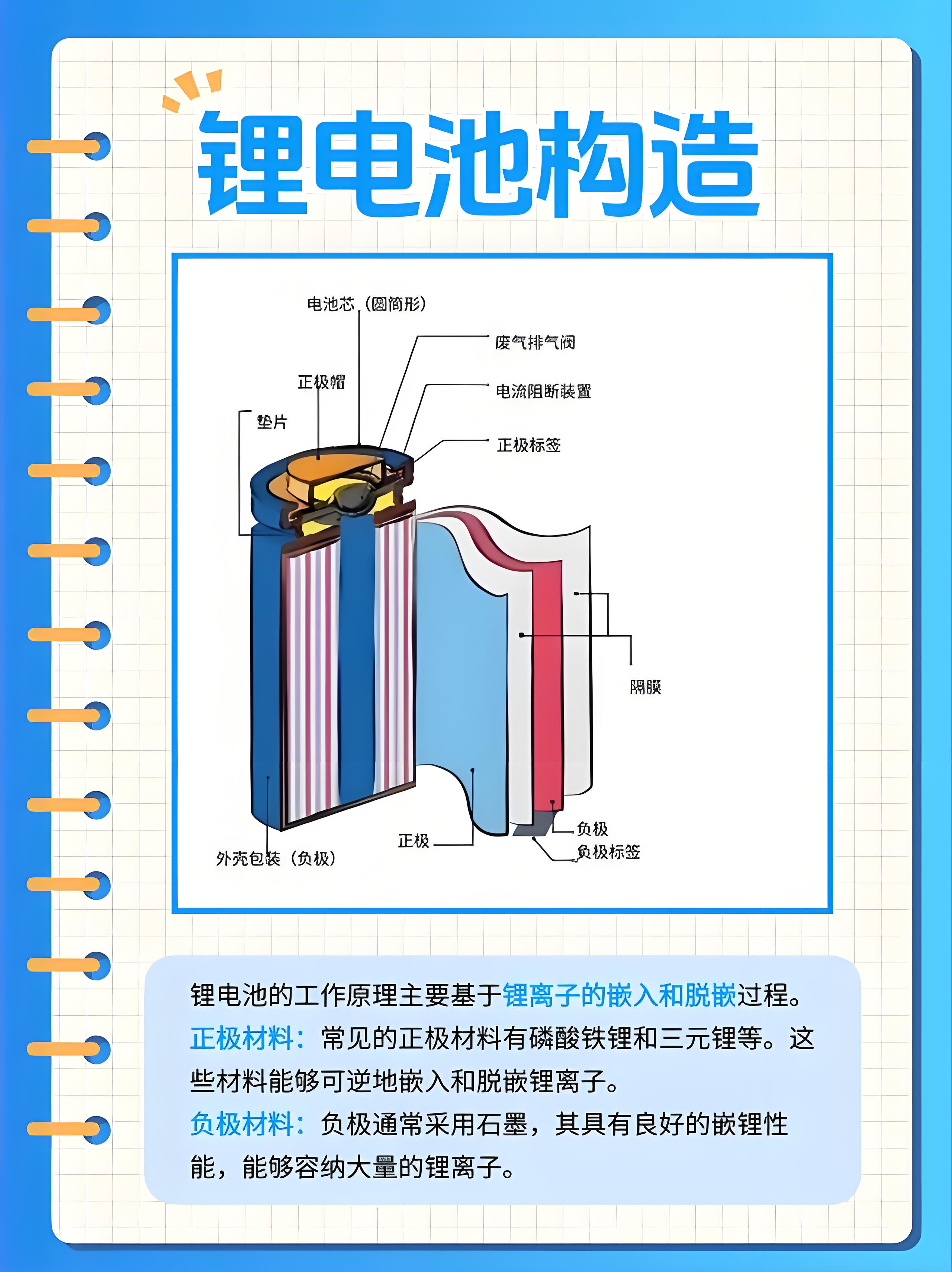 | 电池参数 | 含义 | 典型值 | 影响因素 | |----------|------|--------|----------| | 电压(V) | 单体电池电压 | 3.7V标称,4.2V满电 | 化学特性决定 | | 容量(mAh) | 电池储存电量 | 1000-6000mAh | 体积重量限制 | | 放电倍率(C) | 最大放电电流倍数 | 10C-50C | 内阻和散热能力 | | 循环寿命 | 充放电循环次数 | 300-500次 | 使用和保养方式 | ### 🔢 电池配置与选择 无人机电池通常采用串联配置来提高电压,并联配置来增加容量。正确的电池配置是保证飞行性能的基础。 - **串联配置(S)**:增加电压,如3S=11.1V,4S=14.8V,6S=22.2V - **并联配置(P)**:增加容量,如2P表示两块电池并联 - **常见配置**:3S1P、4S1P、6S1P等 | 电池配置 | 电压范围 | 适用机型 | 特点 | |----------|----------|----------|------| | 1S (3.7V) | 3.0-4.2V | 微型无人机 | 体积小,功率有限 | | 3S (11.1V) | 9.0-12.6V | 小型航拍机 | 平衡性能与重量 | | 4S (14.8V) | 12.0-16.8V | 中型多旋翼 | 主流配置,性能好 | | 6S (22.2V) | 18.0-25.2V | 大型载重机 | 高功率,重量大 | ### ⏱️ 续航时间计算与优化 续航时间是无人机最重要的性能指标之一,需要综合考虑电池容量、功耗和飞行条件。 **续航时间计算公式**: $$T = \frac{C \times \eta}{P} \times 60$$ 其中: - T:续航时间(分钟) - C:电池容量(Ah) - η:放电效率(通常0.8-0.9) - P:平均功耗(W) **续航优化实例计算** 假设某四旋翼无人机配置如下: - 电池:4S 5000mAh(5Ah) - 电压:14.8V(标称) - 总重量:2kg - 悬停功耗:200W **计算过程:** 1. **理论续航时间:** $$T = \frac{5 \times 0.85}{200/14.8} \times 60 = \frac{4.25}{13.5} \times 60 ≈ 18.9 \text{分钟}$$ 2. **实际续航考虑:** - 安全余量:保留20%电量,实际可用容量4Ah - 环境因素:低温、风力影响,效率降低至75% - 实际续航:约15分钟 > "续航时间的每一分钟都是宝贵的,需要在性能和效率之间找到最佳平衡" ### 🌡️ 电池管理与安全 锂电池具有一定的安全风险,需要采用专业的电池管理系统(BMS)进行监控和保护。 **图:电池管理系统** 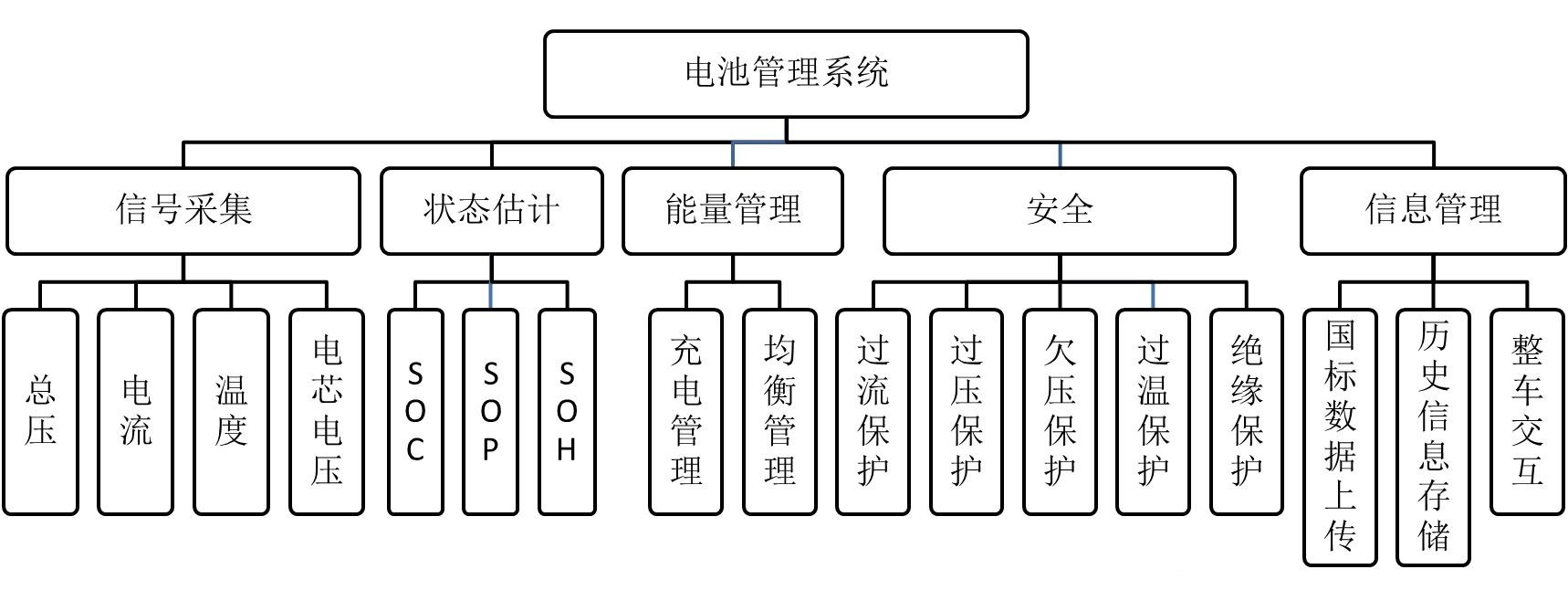 | 保护功能 | 触发条件 | 保护动作 | 重要性 | |----------|----------|----------|--------| | 过压保护 | 单体>4.3V | 停止充电 | 防止过充爆炸 | | 欠压保护 | 单体<3.0V | 切断输出 | 防止过放损坏 | | 过流保护 | 电流>额定值 | 限制电流 | 防止过热起火 | | 温度保护 | 温度>60°C | 停止工作 | 防止热失控 | --- ## ⚙️ 电机类型与效率 ### 🔄 无刷电机工作原理 无刷直流电机(BLDC)是现代无人机的标准动力配置,相比有刷电机具有效率高、寿命长、控制精确等显著优势。 **工作原理**: - 定子:产生旋转磁场的线圈组 - 转子:永磁体,跟随磁场旋转 - 霍尔传感器:检测转子位置 - 电子换向:通过电调控制电流方向 ### 📊 电机关键参数 选择合适的电机需要理解各项技术参数的含义和相互关系。 | 参数名称 | 符号 | 单位 | 含义 | 选择要点 | |----------|------|------|------|----------| | KV值 | KV | rpm/V | 每伏特转速 | 低KV配大桨,高KV配小桨 | | 最大功率 | Pmax | W | 最大输出功率 | 根据推重比需求选择 | | 最大电流 | Imax | A | 最大工作电流 | 影响电调和电池选择 | | 内阻 | R | mΩ | 电机内部电阻 | 越小效率越高 | | 重量 | m | g | 电机重量 | 影响整机功重比 | ### 🎯 电机效率分析 电机效率直接影响无人机的续航时间和发热情况,是选择电机的重要考虑因素。 **图:电机效率曲线** ```echarts { "xAxis": { "type": "category", "name": "负载 (%)", "data": ["10", "20", "30", "40", "50", "60", "70", "80", "90", "100"] }, "yAxis": { "type": "value", "name": "效率 (%)", "min": 0, "max": 100 }, "series": [{ "name": "电机效率", "data": [45, 58, 68, 75, 82, 85, 88, 82, 70, 58], "type": "line", "smooth": true, "markPoint": { "data": [{ "type": "max", "name": "最高效率点" }] } }] } ``` **效率影响因素**: - **负载匹配**:在额定功率70-80%时效率最高 - **转速范围**:在最佳转速区间内工作 - **温度控制**:过热会显著降低效率 - **制造工艺**:轴承质量、绕组工艺等 > "高效率的电机不仅能延长续航时间,还能减少发热,提高系统可靠性" ### 🔧 电机选型与匹配 电机选型需要综合考虑无人机的重量、用途、性能要求等多个因素。 | 应用场景 | 推荐KV值 | 电机功率 | 螺旋桨配置 | 特点 | |----------|----------|----------|------------|------| | 航拍悬停 | 300-600 | 200-400W | 大直径低螺距 | 效率高,续航长 | | 竞速飞行 | 1500-2500 | 400-800W | 小直径高螺距 | 响应快,速度高 | | 载重运输 | 400-800 | 500-1000W | 大直径中螺距 | 推力大,稳定性好 | | 室内飞行 | 1000-2000 | 100-300W | 小直径低螺距 | 安全性高,噪音小 | ### 🌡️ 散热与维护 电机在工作过程中会产生热量,良好的散热设计对保证性能和寿命至关重要。 - **自然散热**:利用螺旋桨产生的气流 - **主动散热**:安装散热风扇 - **导热设计**:使用导热材料和散热片 - **定期维护**:清洁、润滑、检查磨损 --- ## 🎛️ 电调(ESC)工作原理 ### ⚡ ESC基础概念 电子调速器(Electronic Speed Controller,简称ESC)是连接飞控系统和无刷电机的关键部件,负责将飞控的控制信号转换为驱动电机的三相交流电。 **图:ESC组成** 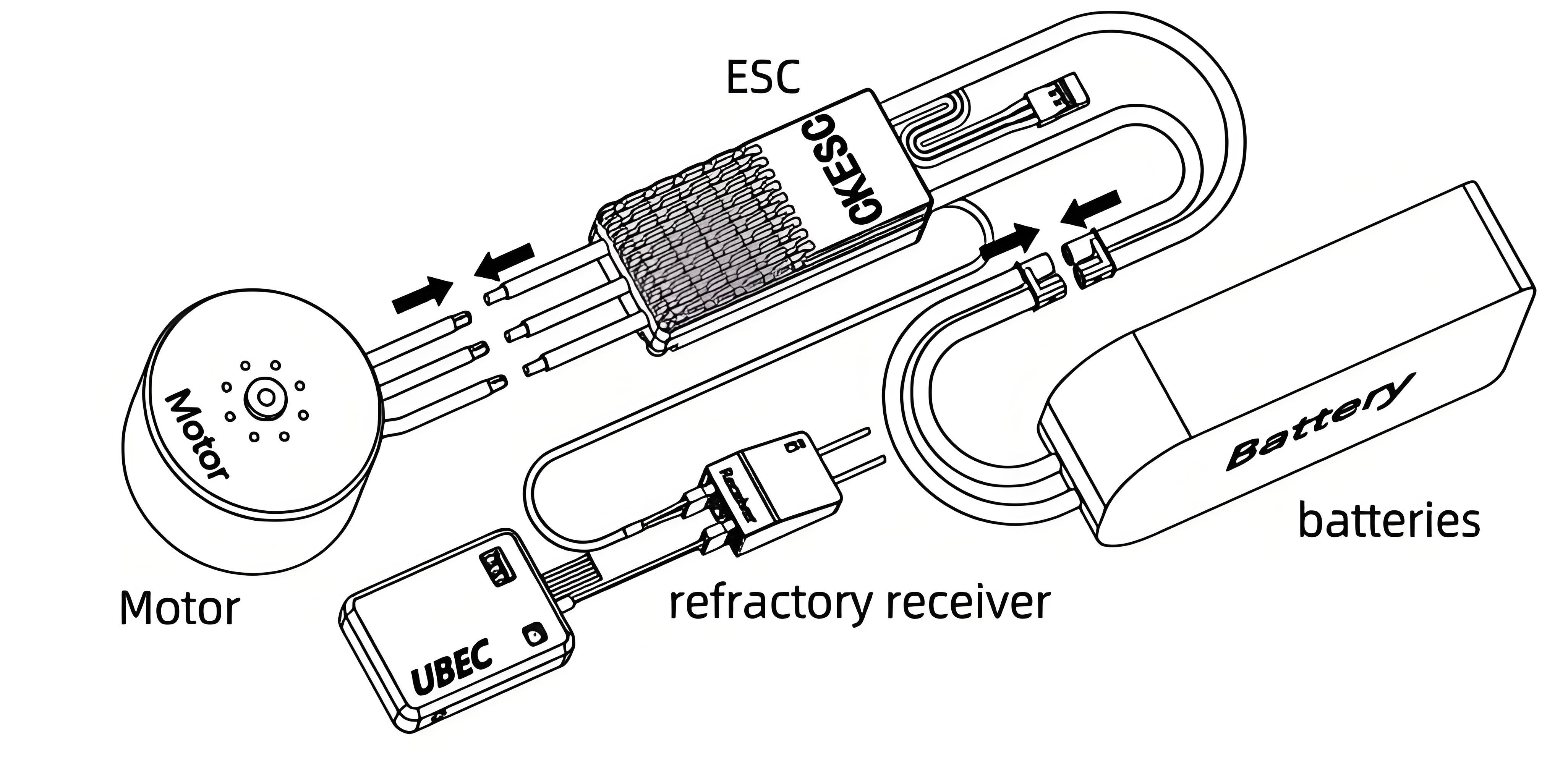 **主要功能**: - **信号转换**:将PWM控制信号转换为电机驱动信号 - **功率放大**:将低功率控制信号放大为高功率驱动信号 - **换向控制**:根据转子位置控制电流方向 - **保护功能**:过流、过压、过温保护 ### 🔌 ESC硬件结构 ESC内部集成了多个功能模块,每个模块都有其特定的作用。 | 功能模块 | 主要器件 | 作用 | 技术要求 | |----------|----------|------|----------| | 功率开关 | MOSFET | 控制电流通断 | 低内阻,快速开关 | | 控制器 | MCU | 执行控制算法 | 高速运算,实时响应 | | 驱动电路 | 栅极驱动器 | 驱动MOSFET | 隔离保护,快速响应 | | 传感器接口 | 比较器 | 检测反电动势 | 高精度,低噪声 | ### 📡 控制信号与协议 ESC接收来自飞控的控制信号,常见的控制协议有多种类型。 **图:PWM信号示意图** 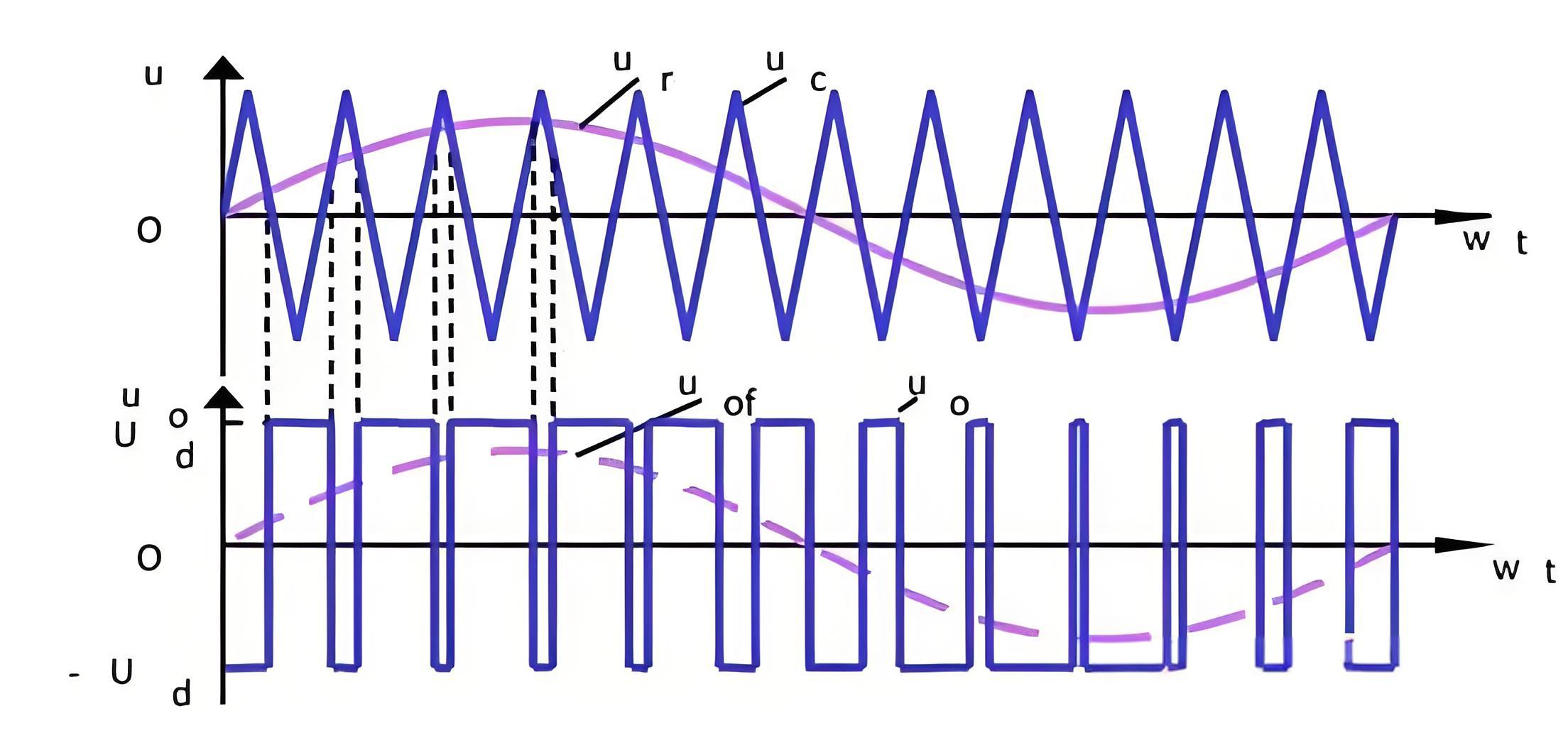 | 协议类型 | 信号特点 | 更新频率 | 优缺点 | |----------|----------|----------|--------| | PWM | 脉宽调制,1-2ms | 50-400Hz | 简单可靠,频率有限 | | OneShot125 | 125-250μs脉宽 | 1-8kHz | 响应快,兼容性好 | | OneShot42 | 42-84μs脉宽 | 1-8kHz | 更快响应 | | DShot | 数字信号 | 1-8kHz | 抗干扰,双向通信 | | Multishot | 5-25μs脉宽 | 1-32kHz | 极快响应 | ### 🔄 无感控制技术 现代ESC多采用无感控制技术,通过检测反电动势来判断转子位置,无需额外的位置传感器。 **反电动势检测原理**: - 当电机转动时,绕组会产生反电动势 - 通过检测反电动势的过零点判断转子位置 - 根据位置信息控制换向时机 > "无感控制技术让电调变得更加简洁可靠,同时降低了成本和复杂度" ### ⚙️ ESC参数调节 ESC的性能可以通过调节各种参数来优化,以适应不同的电机和应用需求。 **图:ESC调参界面**  | 参数名称 | 调节范围 | 影响 | 调节建议 | |----------|----------|------|----------| | 启动功率 | 0.1-1.0 | 启动平顺性 | 大桨用低值,小桨用高值 | | 换向时机 | 0-30° | 效率和平顺性 | 根据电机特性微调 | | 制动强度 | 0-100% | 停桨速度 | 竞速用高值,航拍用低值 | | 低压保护 | 2.8-3.5V | 电池保护 | 根据电池类型设置 | ### 🛡️ 保护功能与故障诊断 ESC集成了多种保护功能,能够在异常情况下保护电机和电池安全。 | 保护类型 | 检测方式 | 保护动作 | 故障排除 | |----------|----------|----------|----------| | 过流保护 | 电流传感器 | 限制输出 | 检查电机负载 | | 过温保护 | 温度传感器 | 降功率运行 | 改善散热条件 | | 失步保护 | 反电动势检测 | 重新同步 | 检查电机连接 | | 低压保护 | 电压监测 | 停止输出 | 更换电池 | --- ## 🔧 动力系统集成与优化 ### ⚖️ 系统匹配原则 动力系统的各个组件需要合理匹配,才能发挥最佳性能。 **匹配计算实例** 以某航拍四旋翼为例: - 目标:2kg总重,推重比2:1 - 单电机推力需求:2kg × 2 ÷ 4 = 1kg - 电机选择:KV值600,最大功率400W - 螺旋桨:10寸直径,4.5寸螺距 - 电调:30A持续电流 - 电池:4S 5000mAh > "动力系统的匹配就像搭积木,每个部件都要在合适的位置发挥作用" ### 📊 性能测试与调优 动力系统集成后需要进行全面的性能测试和调优。 **图:推力测试台**  | 测试项目 | 测试方法 | 关键指标 | 优化方向 | |----------|----------|----------|----------| | 推力测试 | 推力测试台 | 最大推力、效率 | 螺旋桨匹配 | | 功耗测试 | 功率计 | 悬停功耗 | 系统效率 | | 温度测试 | 红外测温 | 工作温度 | 散热优化 | | 振动测试 | 加速度计 | 振动频率 | 动平衡调整 | ### 🔍 故障诊断与维护 定期的维护和及时的故障诊断是保证动力系统可靠运行的关键。 **常见故障及处理**: | 故障现象 | 可能原因 | 诊断方法 | 解决方案 | |----------|----------|----------|----------| | 电机不转 | ESC故障、连线问题 | 检查连接、测试ESC | 重新连接或更换ESC | | 推力不足 | 电池电压低、螺旋桨损坏 | 测量电压、检查螺旋桨 | 充电或更换部件 | | 异常发热 | 过载、散热不良 | 测量电流、检查散热 | 降低负载、改善散热 | | 振动过大 | 螺旋桨不平衡、电机磨损 | 动平衡测试 | 更换螺旋桨或电机 | --- ## 🚀 动力系统发展趋势 ### 🔋 新型电池技术 未来的电池技术将朝着更高能量密度、更快充电速度、更长循环寿命的方向发展。 | 电池类型 | 能量密度 | 充电速度 | 循环寿命 | 发展阶段 | |----------|----------|----------|----------|----------| | 锂聚合物 | 150-250Wh/kg | 1-2C | 300-500次 | 成熟应用 | | 固态电池 | 300-500Wh/kg | 5-10C | 1000+次 | 研发阶段 | | 氢燃料电池 | 500-1000Wh/kg | 快速补充 | 5000+次 | 试验应用 | | 石墨烯电池 | 200-300Wh/kg | 10-20C | 1000+次 | 实验室阶段 | ### ⚙️ 智能化动力系统 人工智能技术的应用将使动力系统更加智能化和自适应。 - **智能功率管理**:根据飞行任务自动调节功率分配 - **预测性维护**:通过数据分析预测部件寿命 - **自适应控制**:根据环境条件自动优化控制参数 - **故障自诊断**:实时监测系统状态,自动识别故障 > "智能化的动力系统将让无人机变得更加聪明,能够自主优化性能和预防故障" ### 🌱 绿色环保发展 环保要求推动动力系统向更加清洁、可持续的方向发展。 **图:太阳能无人机**  - **太阳能补充**:集成太阳能电池板延长续航 - **氢燃料电池**:零排放的清洁能源 - **可回收材料**:使用环保材料制造部件 - **能量回收**:下降过程中回收动能 --- ## 🤔 思考与讨论 1. 为什么说动力系统是无人机的"心脏"?电池、电机、电调三者之间是如何协同工作的? 2. 在选择无人机电池时,如何平衡容量、重量和安全性三个因素? 3. 无刷电机相比有刷电机有哪些优势?为什么现代无人机都采用无刷电机? 4. ESC的无感控制技术是如何工作的?相比有感控制有什么优缺点? 5. 如果要设计一款长续航的无人机,动力系统应该如何优化配置? 6. 未来的动力系统技术发展方向是什么?氢燃料电池和固态电池会带来哪些变革? --- <center> <a href="../../doc/12"> <button style="background: linear-gradient(135deg, #6e8efb, #a777e3); border: none; color: white; padding: 15px 32px; text-align: center; text-decoration: none; display: inline-block; font-size: 16px; margin: 4px 2px; cursor: pointer; border-radius: 12px; box-shadow: 0 4px 8px rgba(0,0,0,0.1);">🚀 继续探索第2.4节:通信系统 🚀</button> </a> </center>
jiangkai
2025年7月26日 19:32
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码