航天科技系列课程之(一)无人机探秘
介绍
📖 第一部分:无人机概述
第一章 无人机的前世今生
1.1 无人机发展历史
1.2 无人机分类与应用
第二章 无人机系统组成
2.1 机体结构
2.2 飞行控制系统
2.3 动力系统
2.4 通信系统
第三章 飞行原理解析
3.1 空气动力学基础
3.2 飞行控制算法
🎮 第二部分:无人机操作
第四章 操作法规与安全
4.1 国内无人机法规
4.2 飞行安全准则
4.3 责任与保险
第五章 遥控器基本操作
5.1 遥控器结构认识
5.2 无人机飞行操控原理
5.3 遥控器基本操作
5.4进阶操作技巧
第六章 Robomaster TT实战
6.1 TT无人机介绍
6.2 基础操作练习
🖥️ 第三部分:无人机仿真
第七章 仿真技术概述
7.1 仿真的意义与价值
7.2 主流仿真软件对比
第八章 Liftoff模拟器详解
8.1 软件安装与配置
8.2 基本操作学习
8.3 进阶训练项目
第九章 仿真与现实的桥梁
9.1 仿真参数调节
9.2 技能迁移训练
💻 第四部分:无人机编程
第十章 编程基础准备
10.1 编程环境搭建
10.2 无人机通信协议
第十一章 自制无人机平台
11.1 硬件平台介绍
11.2 编程接口详解
11.3 开发环境配置
第十二章 基础编程实践
12.1 简单飞行控制
12.2 传感器数据处理
12.3 自动化任务编程
第十三章 高级编程项目
13.1 计算机视觉应用
13.2 人工智能集成
13.3 创新项目开发
本文档使用 MrDoc 发布
-
+
首页
3.1 空气动力学基础
> "空气动力学是无人机飞行的科学基础,揭示了机器如何征服天空的奥秘" --- ## ✈️ 升力产生原理 ### 🌪️ 伯努利定理与升力 升力是使飞行器能够克服重力升空的关键力量。根据伯努利定理和牛顿第三定律,当空气流过机翼或螺旋桨时,会产生压力差从而形成升力。 **图:伯努利定理示意图** 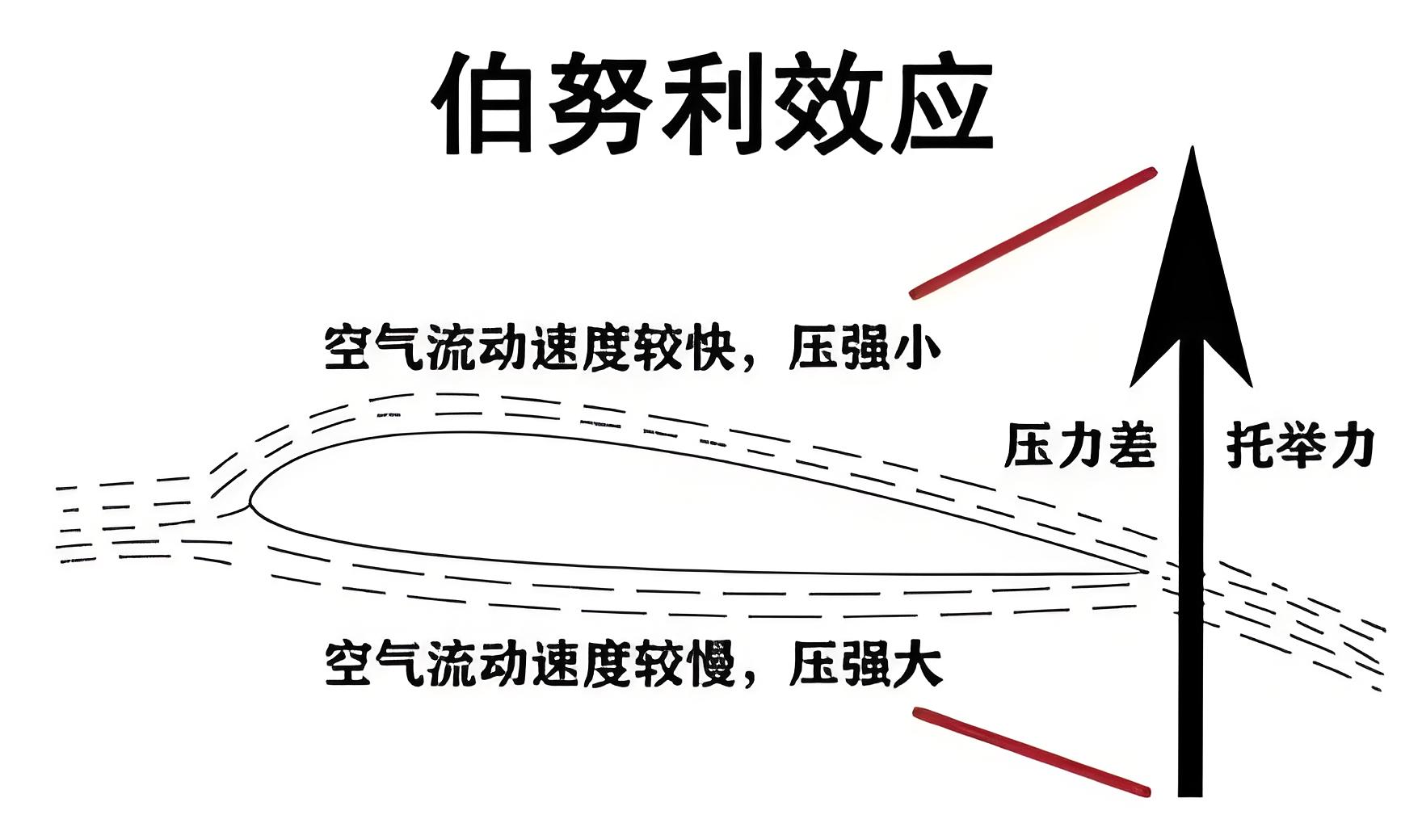 **伯努利方程**: $$P + \frac{1}{2}\rho v^2 + \rho gh = \text{常数}$$ 其中: - P:静压力(Pa) - ρ:空气密度(kg/m³) - v:流速(m/s) - g:重力加速度(9.8 m/s²) - h:高度(m) | 升力产生机制 | 贡献比例 | 物理原理 | 应用场景 | |------------|----------|----------|----------| | 压力差效应 | 60-70% | 伯努利定理 | 固定翼飞行 | | 动量变化 | 30-40% | 牛顿第三定律 | 多旋翼悬停 | | 环流理论 | 理论基础 | 库塔-儒科夫斯基定理 | 翼型设计 | | 涡流效应 | 辅助作用 | 翼尖涡流 | 效率优化 | ### 🔄 多旋翼升力机制 多旋翼无人机通过螺旋桨旋转产生向下的气流,根据牛顿第三定律获得向上的反作用力。 **图:螺旋桨升力原理** 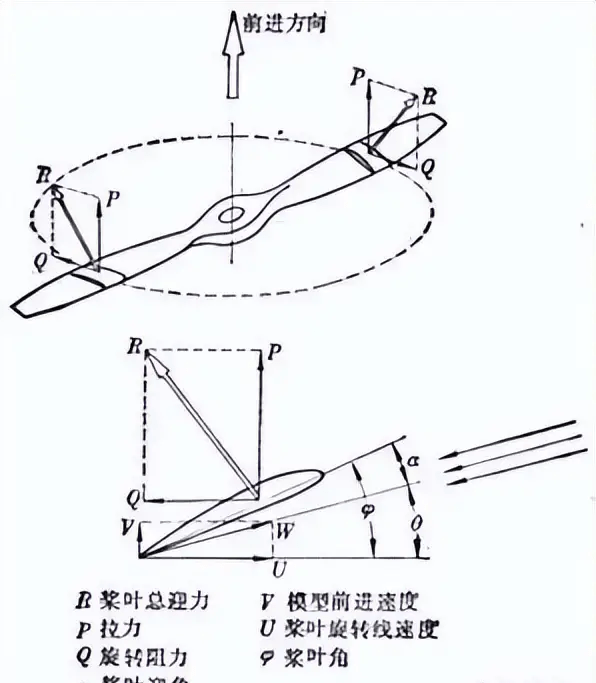 **螺旋桨升力计算**: $$T = \frac{1}{2} \rho A v^2 C_T$$ 其中: - T:推力(N) - ρ:空气密度(1.225 kg/m³,海平面) - A:螺旋桨扫掠面积(m²) - v:诱导速度(m/s) - $C_T$:推力系数 > "理解升力原理就像掌握了飞行的密码,让我们能够设计出更高效的飞行器" ### 📐 翼型与攻角效应 虽然多旋翼主要依靠螺旋桨产生升力,但理解翼型原理对于优化螺旋桨设计和固定翼无人机至关重要。 | 翼型参数 | 符号 | 影响 | 典型值 | |----------|------|------|--------| | 弦长 | c | 升力大小 | 50-200mm | | 厚度比 | t/c | 升阻比 | 8-15% | | 弯度 | f/c | 升力系数 | 2-6% | | 攻角 | α | 升力变化 | 0-15° | **升力系数与攻角关系**: $$C_L = C_{L0} + C_{L\alpha} \cdot \alpha$$ 其中: - $C_L$:升力系数 - $C_{L0}$:零攻角升力系数 - $C_{L\alpha}$:升力线斜率(约2π/弧度) - α:攻角(弧度) ### 🌀 涡流与失速现象 当攻角过大时,气流会在翼面上分离,形成涡流并导致失速,这是飞行中需要避免的危险状态。 **图:失速涡流**  - **失速攻角**:通常在15-20° - **失速特征**:升力急剧下降,阻力增加 - **恢复方法**:减小攻角,增加速度 - **预防措施**:安装失速警告系统 --- ## ⚖️ 阻力与推力平衡 ### 🌬️ 阻力类型与分析 阻力是阻碍无人机前进的力量,理解不同类型的阻力有助于优化飞行效率。 | 阻力类型 | 产生原因 | 占比 | 减小方法 | |----------|----------|------|----------| | 摩擦阻力 | 空气粘性 | 20-30% | 光滑表面 | | 压差阻力 | 压力分布不均 | 40-50% | 流线型设计 | | 诱导阻力 | 升力产生副产品 | 20-30% | 高展弦比 | | 干扰阻力 | 部件间干扰 | 5-10% | 整体化设计 | **总阻力计算**: $$D = \frac{1}{2} \rho v^2 S C_D$$ 其中: - D:阻力(N) - ρ:空气密度(kg/m³) - v:飞行速度(m/s) - S:参考面积(m²) - $C_D$:阻力系数 ### 🚀 推力需求计算 无人机要维持稳定飞行,推力必须与阻力平衡。不同飞行状态下的推力需求不同。 **推力平衡实例计算** 假设某固定翼无人机参数如下: - 重量:2kg - 翼展:1.2m - 翼弦:0.2m - 巡航速度:15m/s - 升力系数:0.8 - 阻力系数:0.05 **计算过程:** 1. **翼面积计算:** $$S = \text{翼展} \times \text{翼弦} = 1.2 \times 0.2 = 0.24 \text{ m}^2$$ 2. **升力需求:** $$L = mg = 2 \times 9.8 = 19.6 \text{ N}$$ 3. **验证升力:** $$L = \frac{1}{2} \rho v^2 S C_L = \frac{1}{2} \times 1.225 \times 15^2 \times 0.24 \times 0.8 = 26.5 \text{ N}$$ (升力充足,可以飞行) 4. **阻力计算:** $$D = \frac{1}{2} \rho v^2 S C_D = \frac{1}{2} \times 1.225 \times 15^2 \times 0.24 \times 0.05 = 1.66 \text{ N}$$ 5. **推力需求:** 水平飞行时,推力 = 阻力 = 1.66 N > "推力与阻力的平衡就像天平的两端,任何不平衡都会改变飞行状态" ### ⚡ 功率需求与效率 飞行功率直接影响无人机的续航时间,需要在性能和效率之间找到最佳平衡点。 **功率计算公式**: $$P = T \cdot v$$ 其中: - P:功率(W) - T:推力(N) - v:飞行速度(m/s) | 飞行状态 | 推力需求 | 功率需求 | 效率特点 | |----------|----------|----------|----------| | 悬停 | 等于重量 | 最高 | 效率最低 | | 低速飞行 | 略大于阻力 | 较高 | 效率较低 | | 巡航飞行 | 等于阻力 | 适中 | 效率最高 | | 高速飞行 | 远大于阻力 | 很高 | 效率下降 | ### 🎯 升阻比优化 升阻比(L/D)是衡量飞行器气动效率的重要指标,直接影响续航性能。 **升阻比计算**: $$\frac{L}{D} = \frac{C_L}{C_D}$$ | 飞行器类型 | 典型升阻比 | 最佳升阻比速度 | 应用特点 | |------------|------------|----------------|----------| | 滑翔机 | 40-60 | 低速 | 长时间滞空 | | 客机 | 15-20 | 中速 | 长距离运输 | | 战斗机 | 8-12 | 高速 | 机动性优先 | | 多旋翼 | 3-6 | 悬停 | 垂直起降 | --- ## 🔄 多旋翼稳定性原理 ### ⚖️ 静稳定性分析 静稳定性是指无人机在受到外界扰动后,自动恢复到原始状态的能力。这是保证飞行安全的基础。 | 稳定性类型 | 定义 | 影响因素 | 设计要求 | |------------|------|----------|----------| | 滚转稳定性 | 绕X轴旋转稳定 | 重心高度、臂长 | 重心低于螺旋桨平面 | | 俯仰稳定性 | 绕Y轴旋转稳定 | 前后重心分布 | 重心接近几何中心 | | 偏航稳定性 | 绕Z轴旋转稳定 | 转动惯量分布 | 合理的臂长配置 | | 高度稳定性 | 垂直方向稳定 | 推力平衡 | 精确的推力控制 | ### 🎛️ 动稳定性控制 动稳定性涉及无人机在扰动后的运动特性,需要通过控制系统来实现。 **稳定性判据**: - **正稳定**:扰动后自动恢复 - **中性稳定**:扰动后保持新状态 - **负稳定**:扰动后偏离加剧 **多旋翼稳定控制原理**: 1. **滚转控制**: - 增加右侧电机转速,减少左侧电机转速 - 产生向左的滚转力矩 2. **俯仰控制**: - 增加后方电机转速,减少前方电机转速 - 产生向前的俯仰力矩 3. **偏航控制**: - 调整对角电机转速差 - 利用反扭矩产生偏航力矩 > "稳定性控制就像骑自行车,需要不断的微调来保持平衡" ### 📊 转动惯量与响应特性 转动惯量决定了无人机的角加速度响应特性,是设计控制系统的重要参数。 **转动惯量计算**: $$I = \sum m_i r_i^2$$ 其中: - I:转动惯量(kg·m²) - $m_i$:质点质量(kg) - $r_i$:质点到转轴距离(m) | 轴向 | 转动惯量特点 | 控制难度 | 优化方法 | |------|------------|----------|----------| | X轴(滚转) | 通常最小 | 容易 | 合理配重 | | Y轴(俯仰) | 中等 | 中等 | 前后平衡 | | Z轴(偏航) | 通常最大 | 困难 | 减小臂长 | ### 🌪️ 陀螺效应影响 螺旋桨的高速旋转会产生陀螺效应,影响无人机的操控特性。 **陀螺力矩计算**: $$M_g = I_p \Omega \omega$$ 其中: - $M_g$:陀螺力矩(N·m) - $I_p$:螺旋桨转动惯量(kg·m²) - Ω:螺旋桨角速度(rad/s) - ω:机体角速度(rad/s) **陀螺效应影响**: - **正面影响**:增强某些方向的稳定性 - **负面影响**:产生耦合运动,增加控制复杂度 - **补偿方法**:控制算法中加入陀螺效应补偿 --- ## 🌍 环境因素影响 ### 🌡️ 大气条件影响 大气条件的变化会显著影响无人机的飞行性能,需要在设计和操作中予以考虑。 | 环境因素 | 标准值 | 影响 | 补偿方法 | |----------|--------|------|----------| | 气压 | 101.325 kPa | 影响空气密度 | 高度补偿 | | 温度 | 15°C | 影响空气密度 | 温度补偿 | | 湿度 | 0% | 轻微影响密度 | 一般忽略 | | 风速 | 0 m/s | 影响地速和稳定性 | 风速补偿 | **空气密度修正公式**: $$\rho = \rho_0 \frac{P}{P_0} \frac{T_0}{T}$$ 其中: - ρ:实际空气密度(kg/m³) - $\rho_0$:标准空气密度(1.225 kg/m³) - P:实际气压(Pa) - $P_0$:标准气压(101325 Pa) - T:实际温度(K) - $T_0$:标准温度(288.15 K) ### 🌪️ 风场影响分析 风是影响无人机飞行的最主要环境因素,需要深入理解其影响机制。 | 风的类型 | 特征 | 影响 | 应对策略 | |----------|------|------|----------| | 稳定风 | 方向速度恒定 | 影响地速 | 航向补偿 | | 阵风 | 突然变化 | 影响稳定性 | 快速响应控制 | | 湍流 | 不规则变化 | 剧烈颠簸 | 避开湍流区 | | 风切变 | 垂直方向变化 | 升降异常 | 高度补偿 | ### 🏔️ 高原飞行特点 高海拔地区的低气压环境对无人机性能有显著影响。 **高度对性能的影响**: | 海拔高度 | 气压比例 | 空气密度比例 | 推力损失 | |----------|----------|------------|----------| | 0m | 100% | 100% | 0% | | 1000m | 89% | 89% | 11% | | 2000m | 79% | 79% | 21% | | 3000m | 69% | 69% | 31% | | 4000m | 62% | 62% | 38% | **高原飞行补偿措施**: - 增大螺旋桨直径或螺距 - 提高电机功率 - 减轻载重 - 调整控制参数 --- ## 🔬 空气动力学实验与测试 ### 🌪️ 风洞试验 风洞试验是验证空气动力学理论和优化设计的重要手段。 **图:风洞试验** 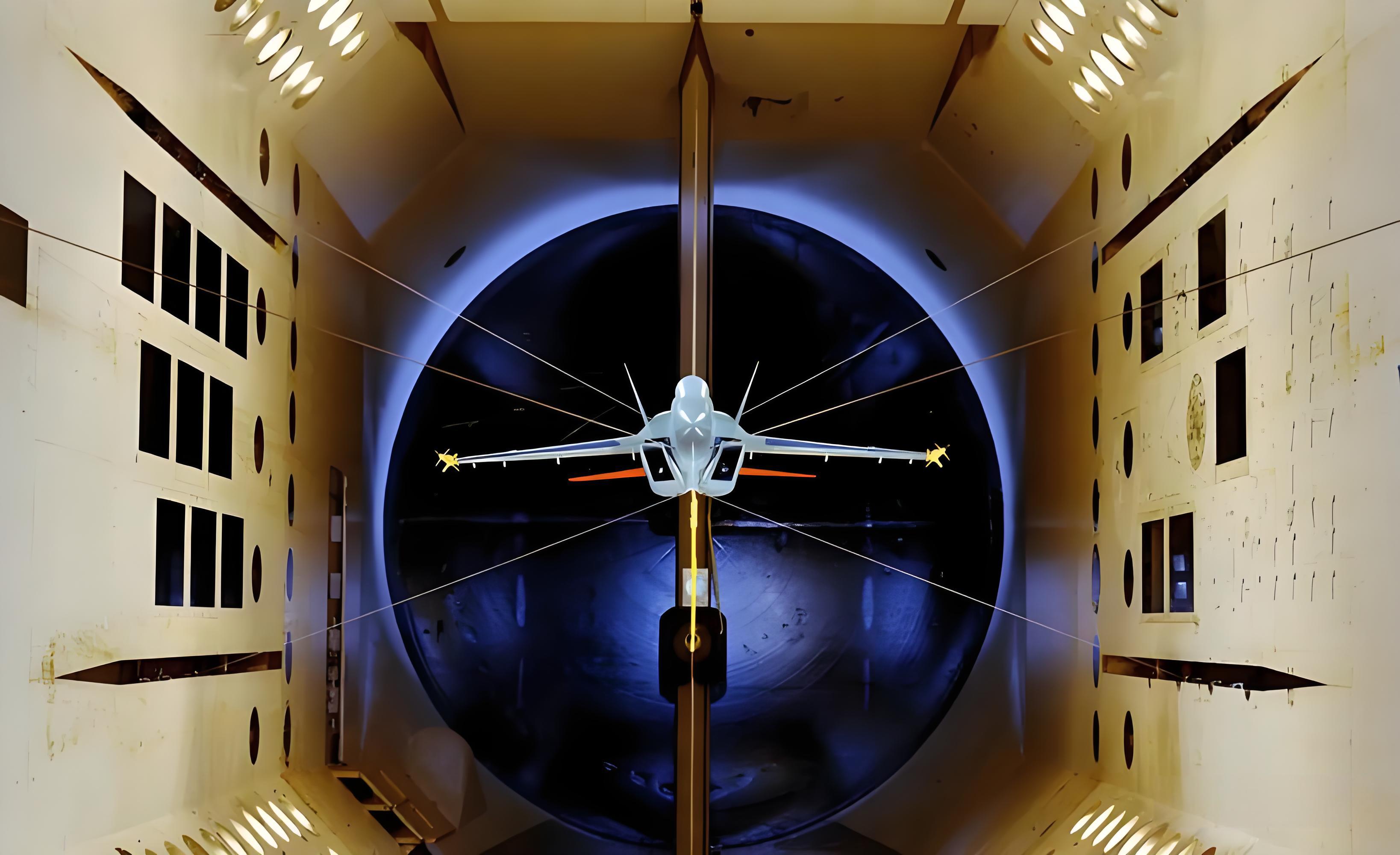 | 试验类型 | 目的 | 测量参数 | 应用阶段 | |----------|------|----------|----------| | 力测试验 | 测量升阻力 | 六分量力 | 设计验证 | | 流场测试 | 观察流动 | 速度分布 | 优化设计 | | 压力测试 | 压力分布 | 表面压力 | 详细分析 | | 动态试验 | 动稳定性 | 动导数 | 控制设计 | ### 📊 CFD仿真分析 计算流体力学(CFD)仿真为空气动力学分析提供了强大的工具。 **图:CFD仿真软件**  **仿真优势**: - 成本低,周期短 - 可视化流场 - 参数化研究 - 优化设计 **仿真局限性**: - 模型简化 - 计算精度限制 - 需要实验验证 ### 🛠️ 飞行测试验证 实际飞行测试是验证理论分析和仿真结果的最终手段。 | 测试项目 | 测试方法 | 数据获取 | 分析重点 | |----------|----------|----------|----------| | 性能测试 | 标准飞行科目 | 飞行数据记录 | 升阻特性 | | 稳定性测试 | 扰动响应 | 姿态数据 | 稳定裕度 | | 操控性测试 | 机动飞行 | 控制输入响应 | 操控品质 | | 环境适应性 | 不同条件飞行 | 环境参数 | 适应能力 | > "理论指导实践,实践验证理论,只有两者结合才能设计出优秀的飞行器" --- ## 🤔 思考与讨论 1. 比较固定翼和多旋翼无人机的升力产生机制有何不同?各自的优缺点是什么? 2. 在设计无人机时,如何通过外形设计来减小各种类型的阻力?哪种阻力最难控制? 3. 静稳定性和动稳定性之间存在什么关系?如何在设计中平衡稳定性和机动性? 4. 高原、高温、大风等极端环境对无人机飞行性能有何影响?应该采取哪些应对措施? 5. 为什么理论计算和CFD仿真都需要通过实际飞行测试来验证?各种测试方法的局限性是什么? 6. 随着新材料和新技术的发展,空气动力学在无人机设计中还有哪些创新可能? --- <center> <a href="../../doc/15"> <button style="background: linear-gradient(135deg, #6e8efb, #a777e3); border: none; color: white; padding: 15px 32px; text-align: center; text-decoration: none; display: inline-block; font-size: 16px; margin: 4px 2px; cursor: pointer; border-radius: 12px; box-shadow: 0 4px 8px rgba(0,0,0,0.1);">🚀 继续探索第3.2节:飞行控制算法 🚀</button> </a> </center>
jiangkai
2025年8月5日 17:20
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码