航天科技系列课程之(一)无人机探秘
介绍
📖 第一部分:无人机概述
第一章 无人机的前世今生
1.1 无人机发展历史
1.2 无人机分类与应用
第二章 无人机系统组成
2.1 机体结构
2.2 飞行控制系统
2.3 动力系统
2.4 通信系统
第三章 飞行原理解析
3.1 空气动力学基础
3.2 飞行控制算法
🎮 第二部分:无人机操作
第四章 操作法规与安全
4.1 国内无人机法规
4.2 飞行安全准则
4.3 责任与保险
第五章 遥控器基本操作
5.1 遥控器结构认识
5.2 无人机飞行操控原理
5.3 遥控器基本操作
5.4进阶操作技巧
第六章 Robomaster TT实战
6.1 TT无人机介绍
6.2 基础操作练习
🖥️ 第三部分:无人机仿真
第七章 仿真技术概述
7.1 仿真的意义与价值
7.2 主流仿真软件对比
第八章 Liftoff模拟器详解
8.1 软件安装与配置
8.2 基本操作学习
8.3 进阶训练项目
第九章 仿真与现实的桥梁
9.1 仿真参数调节
9.2 技能迁移训练
💻 第四部分:无人机编程
第十章 编程基础准备
10.1 编程环境搭建
10.2 无人机通信协议
第十一章 自制无人机平台
11.1 硬件平台介绍
11.2 编程接口详解
11.3 开发环境配置
第十二章 基础编程实践
12.1 简单飞行控制
12.2 传感器数据处理
12.3 自动化任务编程
第十三章 高级编程项目
13.1 计算机视觉应用
13.2 人工智能集成
13.3 创新项目开发
本文档使用 MrDoc 发布
-
+
首页
9.1 仿真参数调节
> 在Liftoff中调节Rates(舵量/转向速率)和PID(飞行控制器参数)可以显著改变无人机的飞行手感,使其更接近你的真实设备或适应个人操控偏好。 ## 1、调节 Rates(转向速率) Rates 决定了无人机对摇杆输入的响应速度,直接影响翻滚(Roll)、俯仰(Pitch)和偏航(Yaw)的灵敏度。 ### 进入 Rates 设置 在workbench中选择你的无人机编辑器。 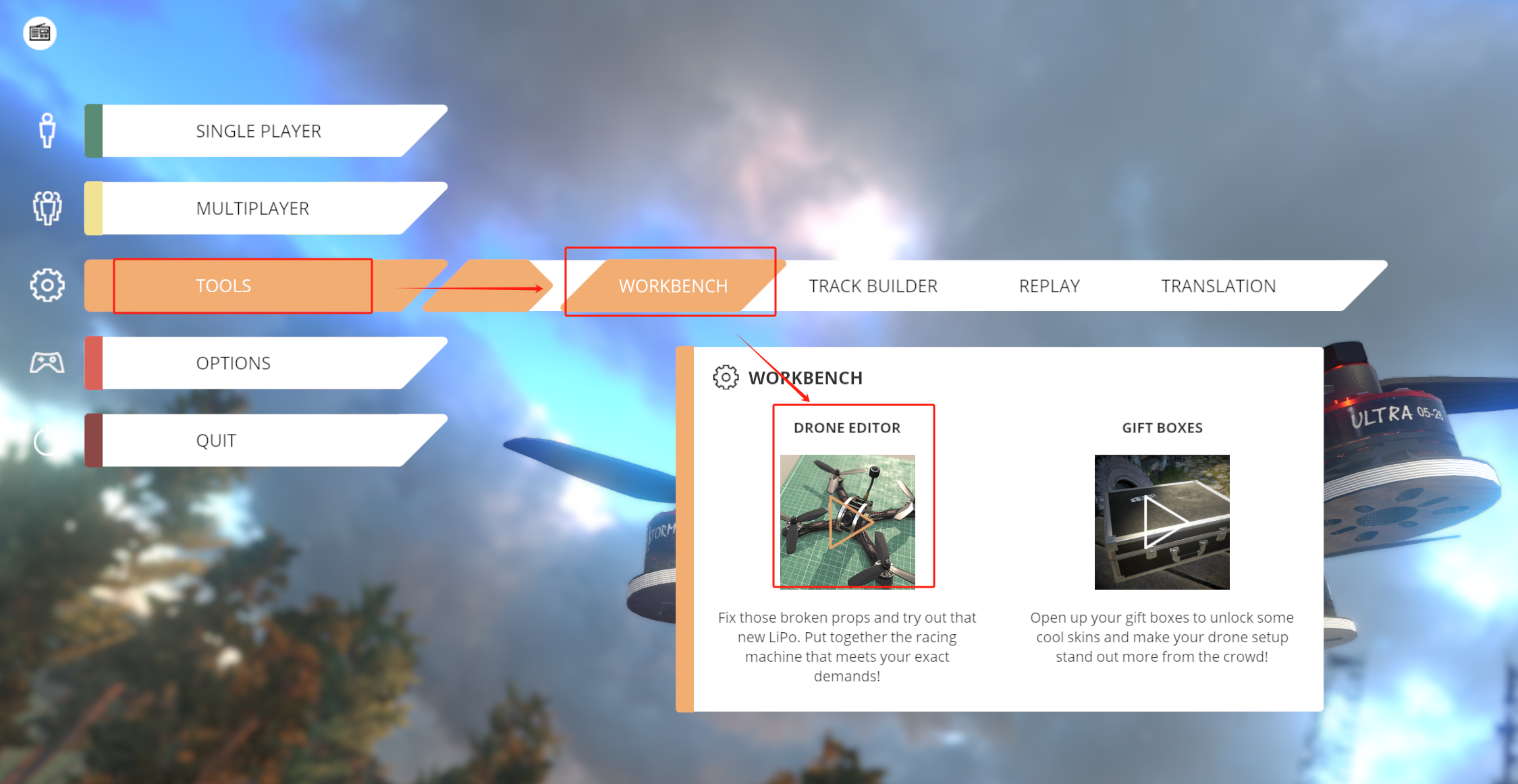 选择test flight后点击play,便可边飞边调参,实时感受参数带来的变化。 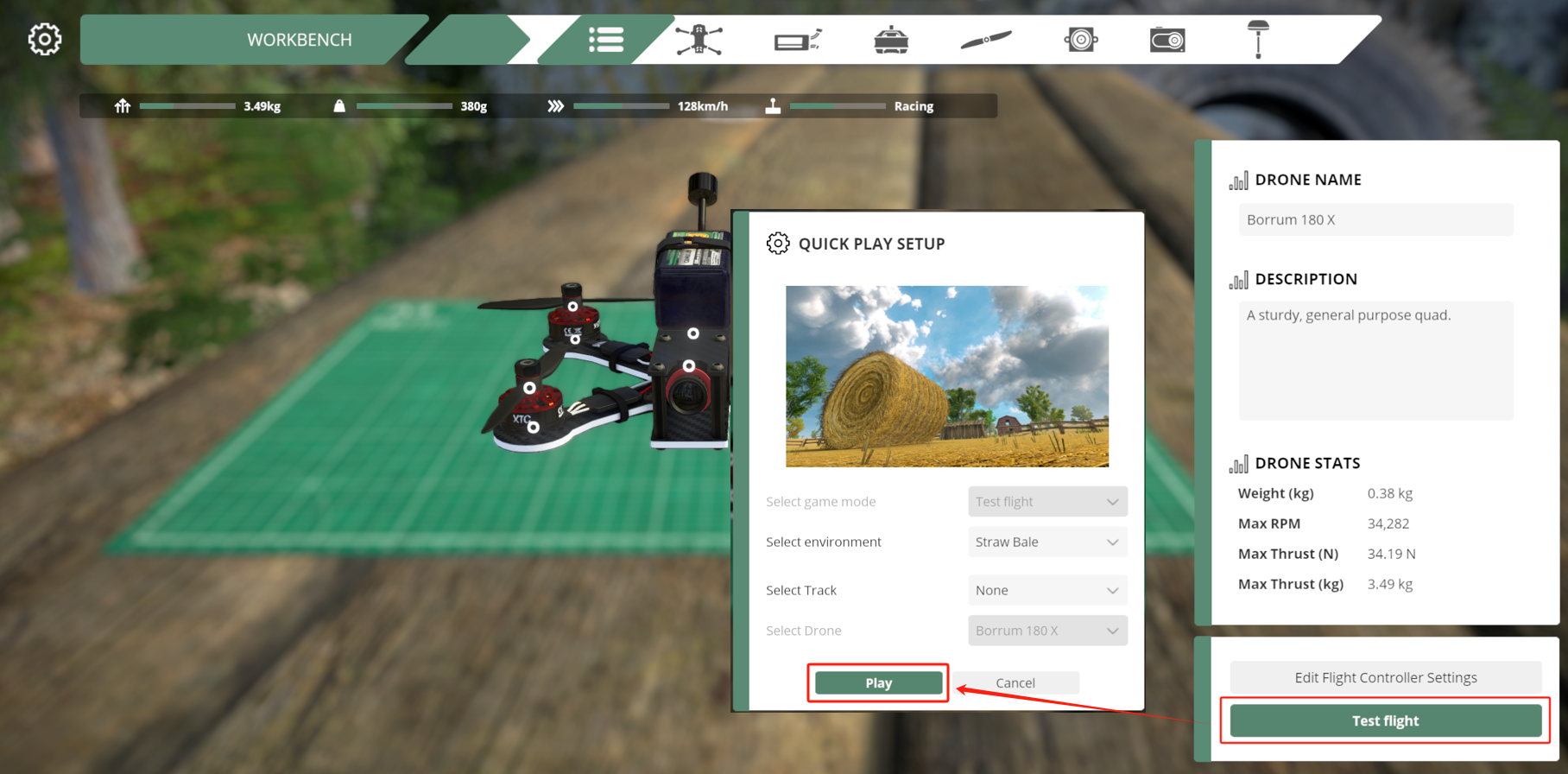 在飞行过程中电机ESC即可选择Flight Controller Settings进入参数调节界面 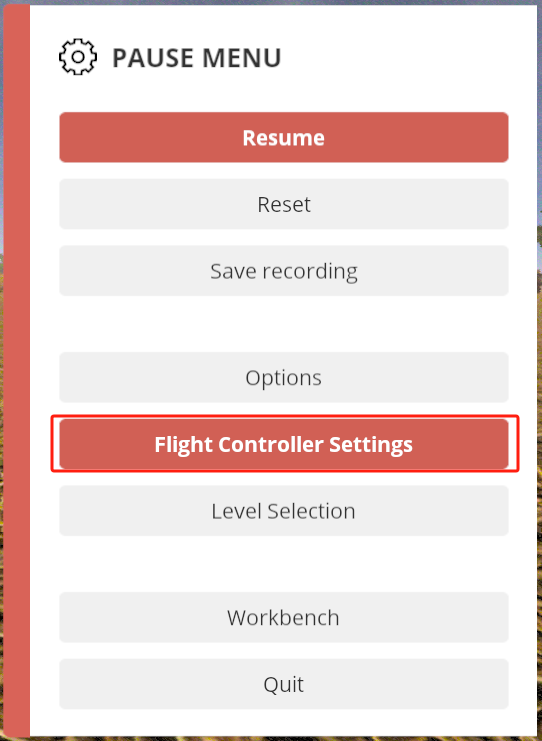 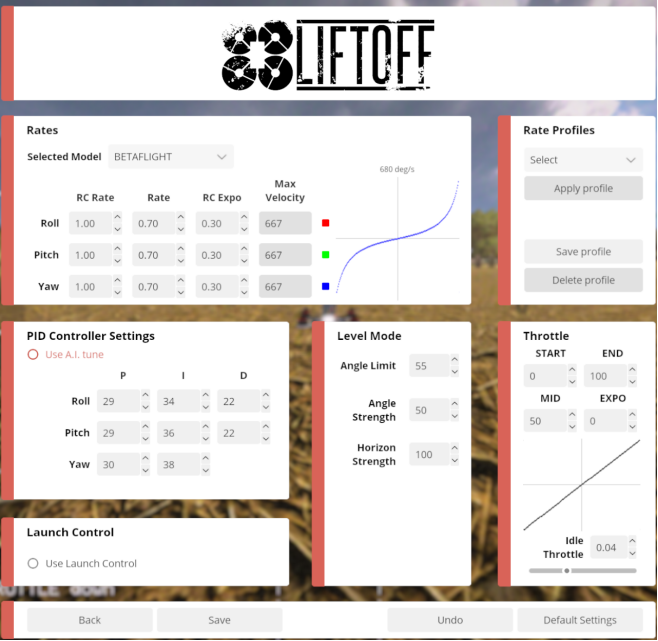 ### 关键参数说明 |参数 | 作用 |推荐初始值 | | --- | --- | --- | | Roll Rate |控制左右翻滚速度(横滚) |0.7 - 1.2 | | Pitch Rate |控制前后俯仰速度 |0.7 - 1.2 | | Yaw Rate | 控制偏航(左右转向)速度 | 0.5 - 1.0(通常低于Roll/Pitch) | | Expo(指数曲线) | 调整摇杆中段的灵敏度(越高则中段越柔和,两端越激进) | 0.2 - 0.4(适合新手) | ### 调节建议 > 竞速玩家:提高 Roll/Pitch Rate(如1.2-1.5),降低Expo(0.1-0.3)以获得更直接的操控。 > 花飞玩家:适中Rate(1.0左右)+ 较高Expo(0.3-0.5)让中段操控更平滑。 > 新手:低Rate(0.5-0.8)+ 较高Expo(0.4)避免过度敏感。 ## 2、调节 PID(飞行控制参数) PID 控制无人机的稳定性,调整不当可能导致抖动(振荡)或反应迟钝。 进入 PID 调参界面的方式同上。 ### 关键参数说明 |参数 | 作用 |推荐初始值 | | --- | --- | --- | | P(比例)|控制纠正错误的力度(值越高,响应越快,但可能振荡) |过高:抖动;过低:反应迟钝 | | I(积分) |消除长期误差(如风力漂移) | 过高:缓慢振荡;过低:无法稳定悬停 | | D(微分) | 抑制快速变化(减少P引起的抖动) | 过高:电机发热;过低:高频振动 | | Filter(滤波) | 降低传感器噪声(如陀螺仪噪声) | 过高:延迟;过低:抖动 | ### 调节技巧 先调P: > 逐步增加P值,直到无人机快速响应但不抖动。 > 若出现高频振荡(如“抽动”),降低P或增加D。 再调I: > 观察悬停时是否漂移,适当增加I值(但避免“I震荡”)。 最后调D: > 用于抑制P引起的抖动,但过高会导致电机过热。 滤波调整: > 如果画面有微抖动,可适当增加陀螺仪滤波(但会增加延迟)。 ## 3、模拟真实无人机的手感 如果你有真实无人机的 Betaflight 配置,可在 Liftoff 中尽量匹配: > 记录真实机的 Rates 和 PID(从 Betaflight 界面查看)。 > 在 Liftoff 中输入相同数值,观察飞行差异。 > 微调 Liftoff 的“物理参数”(如重量、推力)以更接近真实手感。 ## 总结: > 思考: > 为什么调高 Rates 后无人机很难控制? PID 调整后无人机抖动严重? Liftoff 的 PID 和真实飞行不一样? > Rates:决定“操控手感”,优先调整。 PID:优化“飞行稳定性”,次要调整。 匹配真实机:尽量输入相同的 Rates,再微调 PID 和物理参数。 通过合理调整,你可以让 Liftoff 的飞行体验更接近真实,提升训练效率! 🚀
jiangkai
2025年8月3日 16:46
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码