航天科技系列课程之(一)无人机探秘
介绍
📖 第一部分:无人机概述
第一章 无人机的前世今生
1.1 无人机发展历史
1.2 无人机分类与应用
第二章 无人机系统组成
2.1 机体结构
2.2 飞行控制系统
2.3 动力系统
2.4 通信系统
第三章 飞行原理解析
3.1 空气动力学基础
3.2 飞行控制算法
🎮 第二部分:无人机操作
第四章 操作法规与安全
4.1 国内无人机法规
4.2 飞行安全准则
4.3 责任与保险
第五章 遥控器基本操作
5.1 遥控器结构认识
5.2 无人机飞行操控原理
5.3 遥控器基本操作
5.4进阶操作技巧
第六章 Robomaster TT实战
6.1 TT无人机介绍
6.2 基础操作练习
🖥️ 第三部分:无人机仿真
第七章 仿真技术概述
7.1 仿真的意义与价值
7.2 主流仿真软件对比
第八章 Liftoff模拟器详解
8.1 软件安装与配置
8.2 基本操作学习
8.3 进阶训练项目
第九章 仿真与现实的桥梁
9.1 仿真参数调节
9.2 技能迁移训练
💻 第四部分:无人机编程
第十章 编程基础准备
10.1 编程环境搭建
10.2 无人机通信协议
第十一章 自制无人机平台
11.1 硬件平台介绍
11.2 编程接口详解
11.3 开发环境配置
第十二章 基础编程实践
12.1 简单飞行控制
12.2 传感器数据处理
12.3 自动化任务编程
第十三章 高级编程项目
13.1 计算机视觉应用
13.2 人工智能集成
13.3 创新项目开发
本文档使用 MrDoc 发布
-
+
首页
5.2 无人机飞行操控原理
旋翼无人机的旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。 四旋翼飞行器的电机 1和电机 3逆时针旋转的同时,电机 2和电机 4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。在上图中,电机 1和电机 3作逆时针旋转,电机 2和电机 4作顺时针旋转,规定沿 x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降 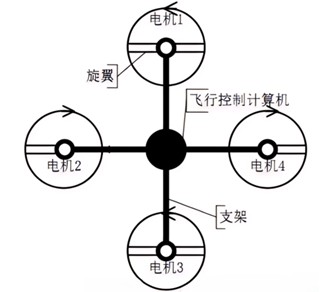 图 2四旋翼无人机结构图 (1)垂直运动 同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿 z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。 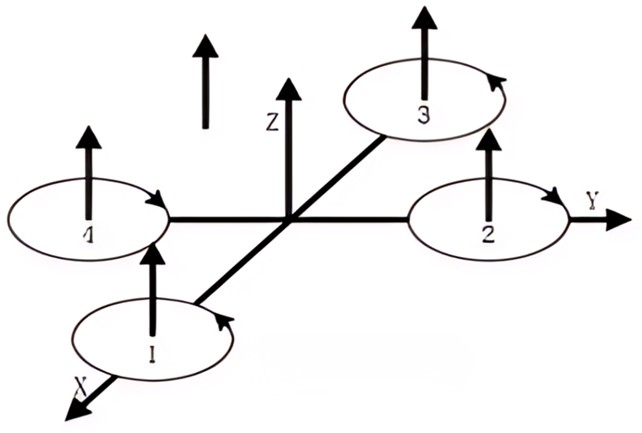 图 3四旋翼无人机垂直运动示意图 (2)偏航运动 旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭 矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼 飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在下图中,当电机 1和电机 3 的转速上升,电机 2 和电机 4 的转速下降时,旋翼 1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕 z轴转动, 实现飞行器的偏航运动,转向与电机 1、电机3的转向相反。 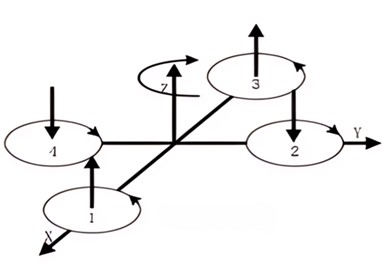 图 4四旋翼无人机偏航运动示意图 (3)前后运动 要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在下图中,增加电机 3转速,使拉力增大,相应减小电机 1转速,使拉力减小,同时保持 其它两个电机转速不变,反扭矩仍然要保持平衡。为使旋翼拉力产生水平分量,飞行器首先发生一定程度的倾斜,从而实现飞行器的前飞运动。向后飞行与向前飞行正好相反。 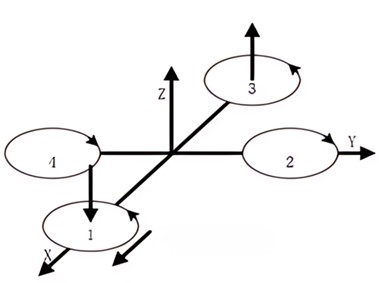 图 5四旋翼无人机前后运动示意图 (4)左右运动 在下图中,由于结构对称,所以倾向飞行的工作原理与前后运动完全一样。 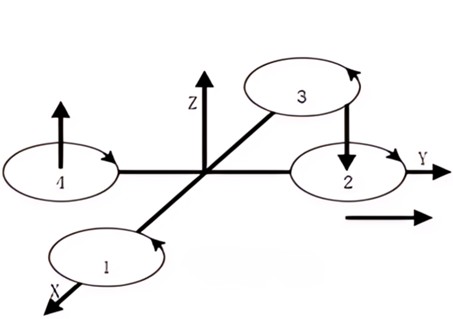 图 6四旋翼无人机左右运动示意图 总结 无人机的飞行本质是通过遥控器精确控制螺旋桨转速,调节升力、扭矩和水平分力的平衡: (1)升降依赖总升力与重力的平衡; (2)偏航依赖反扭矩的不平衡; (3)前后左右平飞依赖机身倾斜产生的水平分力。
jiangkai
2025年8月1日 09:24
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码