航天科技系列课程之(一)无人机探秘
介绍
📖 第一部分:无人机概述
第一章 无人机的前世今生
1.1 无人机发展历史
1.2 无人机分类与应用
第二章 无人机系统组成
2.1 机体结构
2.2 飞行控制系统
2.3 动力系统
2.4 通信系统
第三章 飞行原理解析
3.1 空气动力学基础
3.2 飞行控制算法
🎮 第二部分:无人机操作
第四章 操作法规与安全
4.1 国内无人机法规
4.2 飞行安全准则
4.3 责任与保险
第五章 遥控器基本操作
5.1 遥控器结构认识
5.2 无人机飞行操控原理
5.3 遥控器基本操作
5.4进阶操作技巧
第六章 Robomaster TT实战
6.1 TT无人机介绍
6.2 基础操作练习
🖥️ 第三部分:无人机仿真
第七章 仿真技术概述
7.1 仿真的意义与价值
7.2 主流仿真软件对比
第八章 Liftoff模拟器详解
8.1 软件安装与配置
8.2 基本操作学习
8.3 进阶训练项目
第九章 仿真与现实的桥梁
9.1 仿真参数调节
9.2 技能迁移训练
💻 第四部分:无人机编程
第十章 编程基础准备
10.1 编程环境搭建
10.2 无人机通信协议
第十一章 自制无人机平台
11.1 硬件平台介绍
11.2 编程接口详解
11.3 开发环境配置
第十二章 基础编程实践
12.1 简单飞行控制
12.2 传感器数据处理
12.3 自动化任务编程
第十三章 高级编程项目
13.1 计算机视觉应用
13.2 人工智能集成
13.3 创新项目开发
本文档使用 MrDoc 发布
-
+
首页
5.3 遥控器基本操作
一手型设置 手型设置指操作杆与无人机飞行动作的对应关系,全球主流有两种标准,需根据个人习惯或地区规范选择: (1)日本手 左杆:上下控制俯仰(上推无人机前倾前进,下拉后仰后退),左右控制航向(偏航)(左偏左转向,右偏右转向) 右杆:上下控制油门(上推升高,下拉降低),左右控制横滚(左推左倾左移,右推右倾右移)。 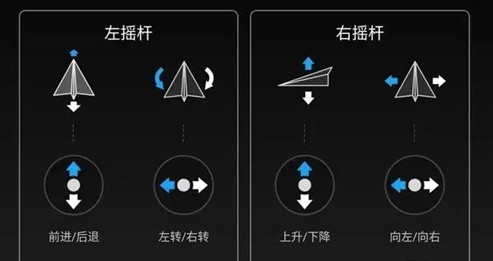 图 7日本手示意图 (2)美国手(最常用) 左杆:上下控制油门(上推升高,下拉降低),左右控制航向(偏航)(左偏左转向,右偏右转向); 右杆:上下控制俯仰(上推无人机前倾前进,下拉后仰后退),左右控制横滚(左推左倾左移,右推右倾右移)。 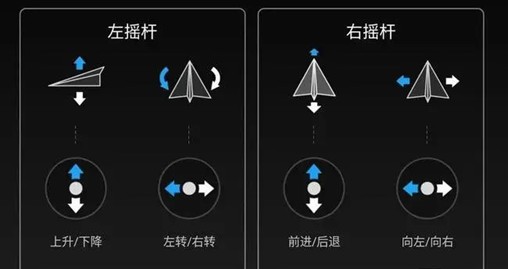 图 8美国手示意图 对于主控制面板上的这4个控制杆,通常情况下只有油门的不会自动回到中位,而其它3个控制杆在被拨动离开中间位置之后,当松开手指之后会自己回至中位。这就是油门通道与其它通道所不同之处。当然油门通道不自动回中也是对无人机的一种保护,以免手滑油门回中发生意外。 两种模式无绝对优劣,主要取决于地区习惯(美国手在全球更通用,尤其在消费级无人机领域)和个人适应能力。现代遥控器通常支持模式切换,可通过菜单自定义通道映射,无需硬件改动即可切换手型。新手建议从美国手入门,因多数教程、模拟器默认此模式,学习资源更丰富 二控制通道 通道(Channel)是遥控器与接收机之间传输信号的 “路径”,每个通道对应一个控制量,常见通道及功能如下: (1)基础 4 通道:无人机飞行的核心控制,对应上述 “油门、俯仰、横滚、航向”,缺一不可。 (2)5 通道:多为飞行模式切换(如手动 / 自动 / 定高模式); (3)6 通道:云台俯仰控制(上下转动); (4)7-8 通道:相机快门、变焦、灯光开关等辅助功能; (5)更高通道(如 9-16 通道):用于多轴无人机的复杂设备控制(如撒药开关、吊舱旋转等)。 对于主控制面板中的4个控制杆分别对应油门、航向、滚转、俯仰。除了这4个主控制通道以外,遥控器还有其它一些控制杆或控制旋钮。用于给用户自己定义。这些辅助通道从原理上讲没有任何区别,它们通常做为无人机的一些特殊功能开关,例如对云台姿态的控制,或是对照相机快门的控制,或是对其它功能开关的控制等等。这些辅助通道的读数会由遥控器发送给接收机,并由接收机将这些数值发送给无人机控制器,再由无人机决定这些辅助通道的控制量来控制哪一项功能。通道数量越多,可控制的设备功能越丰富,主流遥控器多为 6-16 通道。
jiangkai
2025年8月1日 10:12
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码