航天科技系列课程之(一)无人机探秘
介绍
📖 第一部分:无人机概述
第一章 无人机的前世今生
1.1 无人机发展历史
1.2 无人机分类与应用
第二章 无人机系统组成
2.1 机体结构
2.2 飞行控制系统
2.3 动力系统
2.4 通信系统
第三章 飞行原理解析
3.1 空气动力学基础
3.2 飞行控制算法
🎮 第二部分:无人机操作
第四章 操作法规与安全
4.1 国内无人机法规
4.2 飞行安全准则
4.3 责任与保险
第五章 遥控器基本操作
5.1 遥控器结构认识
5.2 无人机飞行操控原理
5.3 遥控器基本操作
5.4进阶操作技巧
第六章 Robomaster TT实战
6.1 TT无人机介绍
6.2 基础操作练习
🖥️ 第三部分:无人机仿真
第七章 仿真技术概述
7.1 仿真的意义与价值
7.2 主流仿真软件对比
第八章 Liftoff模拟器详解
8.1 软件安装与配置
8.2 基本操作学习
8.3 进阶训练项目
第九章 仿真与现实的桥梁
9.1 仿真参数调节
9.2 技能迁移训练
💻 第四部分:无人机编程
第十章 编程基础准备
10.1 编程环境搭建
10.2 无人机通信协议
第十一章 自制无人机平台
11.1 硬件平台介绍
11.2 编程接口详解
11.3 开发环境配置
第十二章 基础编程实践
12.1 简单飞行控制
12.2 传感器数据处理
12.3 自动化任务编程
第十三章 高级编程项目
13.1 计算机视觉应用
13.2 人工智能集成
13.3 创新项目开发
本文档使用 MrDoc 发布
-
+
首页
13.3 创新项目开发
> "飞行器编队控制是通过多架无人机在动态环境中同步运动的技术,以集群智能突破单机能力极限提升复杂场景下的作业效率与鲁棒性。" --- ## ✈️ 基于快速自适应非奇异终端滑模的编队控制 ### 🌪️ 引言 飞行器在军事和民用领域的应用越来越广泛。飞行器集群因其机动性强和部署便捷,能够快速响应搜救任务,提升损伤评估的精准性与决策的有效性,减少人员伤亡和财产损失,成为新型救援装备的重要组成部分。然而,在飞行环境中,工况多变,干扰和不确定性种类繁多,包括常定扰动,如重力和缓慢变化的大气扰动,以及动态扰动,即于系统状 态的相关的气动阻力,随着飞行器速度和姿态的变化而变化,这些因素在不同飞行条件下可能会影响飞行器的稳定性。现有的编队控制方法多采用集中式控制对不确定性干扰控制笼统,在处理复杂环境下的编队控制时存在一定的局限性,尤其是对扰动和不确定性的处理能力有限。因此,针对编队协同运动控制状态收敛问题,提出基于快速自适应非奇异终端滑模,构建快速收敛特性和分布式协同能力的控制器结构,提升飞行器编队在复杂环境下的协同控制性能与鲁棒性。 **图:飞行器编队坐标参考系与姿态示意图 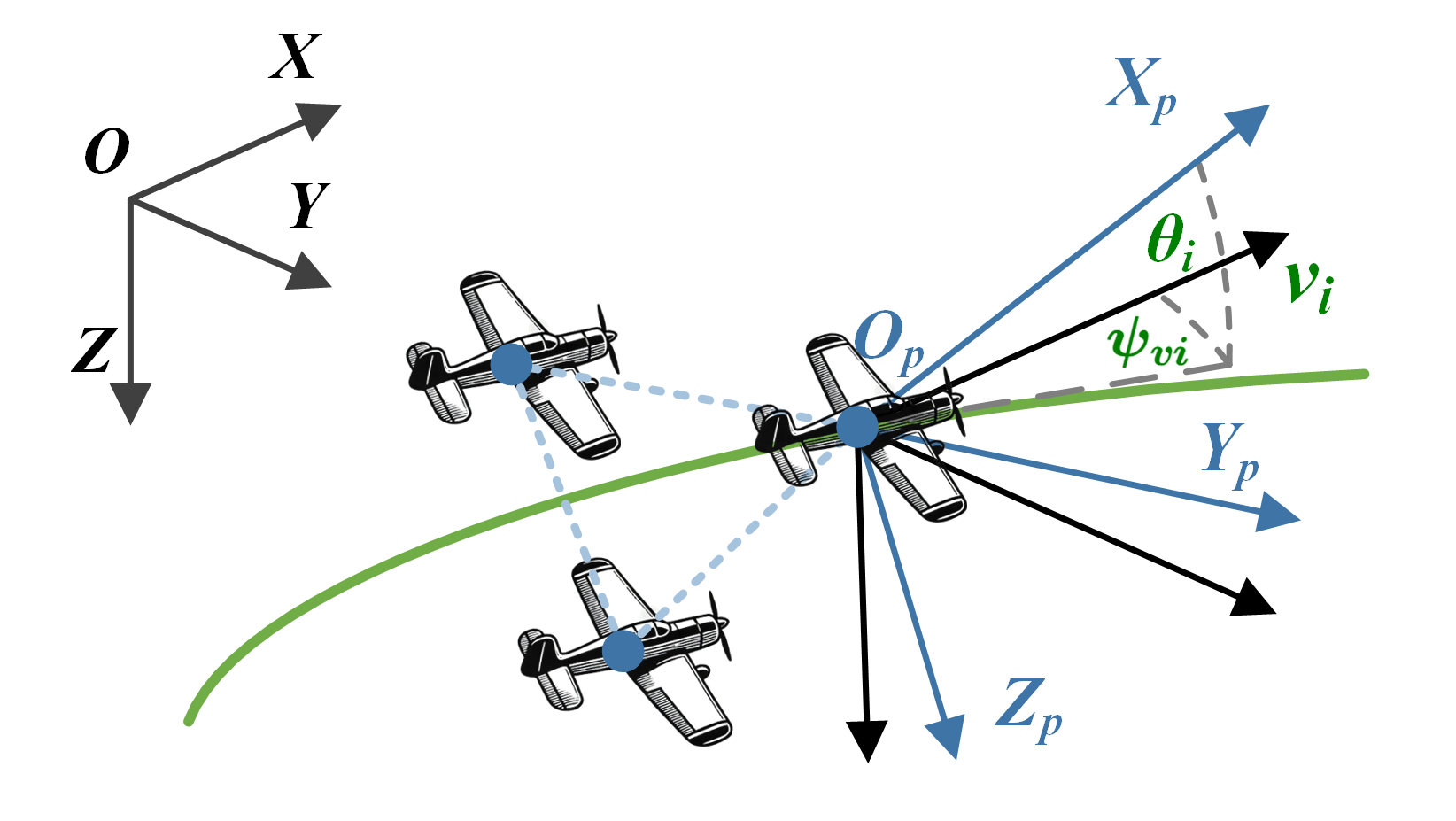 基于一致性共识机制,编队误差变量可以定义为: $$ \epsilon_{i} = p_i - \sum_{j=1}^N \frac{\ell_{ij}}{\ell_{ii}} \left( p_j + E_{ij} \right) $$ 其中,$$p_i$$ 和 $$p_j$$ 分别表示第 $$i$$ 个和第 $$j$$ 个拦截弹在$$t$$ 时刻的位置; $$E_ij$$ 表示第$$j$$ 个至第 $$i$$ 个拦截弹在 t时刻的期望相对距离。 考虑飞行环境中的不确定性和干扰因素,建立固定翼飞行器系统的非线性动力学模型。考虑由N架飞行器组成的非线性集群系统,每架无人机在地固参考系下的运动学方程描述如下: $$ \dot x_{i} = v_i \cos(\theta_i) \cos(\psi_{vi}) \newline \dot y_i = v_i \cos(\theta_i) \sin(\psi_{vi}) \newline \dot z_i = -v_i \sin(\theta_i) $$ 其中, $$x_i$$, $$y_i$$和$$z_i$$分别表示在三维空间中的位置坐标,$$v_i$$, $$\theta_i$$ 和 $$\psi_i$$分别表示无人机的速度、飞行路径角和航向角。 无人机的速度、飞行路径角和航向角的变化率由以下动力学方程给出: $$ \dot v_i = \frac{T_i-D_i}{m_i} -g \sin(\theta_i) + d_{iv} \newline \dot \theta_i = \frac{L_i \cos(\phi_i)}{m_iv_i} - \frac{g\cos(\theta_i)}{v_i} + d_{i\theta} \newline \dot \psi_{vi} = \frac{L_i \sin(\phi)}{m_i v_i \cos(\theta)} + d_{i\psi_v} $$ 其中,$$T_i$$表示发动机推力,$$D_i$$表示阻力, $$m_i$$为无人机的质量, $$g$$为重力加速度, $$L_i$$表示升力, 表示滚转角。上述模型中,推力 、滚转角 和升力 被选作控制变量。推力由油门控制,滚转角由方向舵和副翼控制,升力则由升降舵控制。模型同时考虑了外部扰动项 $$d_{iv}$$ 、$$d_{i\theta}$$和 ,$$d_{i\psi_v}$$以及空气阻力 的影响。阻力的计算较为需要考虑迎风面积、飞行速度、攻角和空气动力学特性,将阻力视为一个非线性扰动。 $$ \dot v_i = g( n_{iT}-n_{iD}- \sin(\theta_i)) + d_{iv} \newline \dot \theta_i = \frac{g}{v_i} (n_{iL}\cos(\phi_i) - \cos(\theta_i)) + d_{i\theta} \newline \dot \psi_{vi} = \frac{g}{v_i} \left( \frac{n_{iL} \sin(\phi_i)}{\cos(\theta_i)} \right) + d_{i\psi_v} . $$ 进而,可得如下统一形式: $$ \ddot{p}_i = M_i u_i + B_i + d_i $$ 其中, $$p_i = [x_i, y_i, z_i]^{\top}$$表示UAV 的空间位置向量, $$u_i = \begin{bmatrix} n_{iT}, n_{iL} \sin(\phi_i), n_{iL} \cos(\phi_i) \end{bmatrix}^{\top} $$表示控制输入向量, $$M_i$$、 $$B_i$$和 $$d_i$$分别表示系统的输入矩阵、干扰相关项和外部扰动向量,其具体表达式如下: $B_i = g[ -\cos\theta_i \cos\psi_{vi} n_{iD}, -\cos\theta_i \sin\psi_{vi} n_{iD}, \sin\theta_i n_{iD} + 1 ]^T$ $$ %M_i = g\; \left(\!\begin{array}{ccc} \cos(\theta_i)\cos(\psi_{vi}) & -\sin(\theta_i) & -\sin(\theta_i)\cos(\psi_{vi}) \\ \cos(\theta_i)\sin(\psi_{vi}) & \cos(\psi_{vi}) & -\sin(\theta_i)\sin(\psi_{vi}) \\ -\sin(\theta_i) & 0 & -\cos(\theta_i) \end{array}\!\right) $$ 其中,阻力载荷 受正面迎风面积、飞行速度及阻力系数的影响,因此在实际应用中会引入模型不确定性 。在不失一般性的前提下,假设外部扰动满足 ,其中 ,扰动向量和其上界分别定义为 , 。 </center>
jiangkai
2025年8月6日 09:07
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码