航天科技系列课程之(一)无人机探秘
介绍
📖 第一部分:无人机概述
第一章 无人机的前世今生
1.1 无人机发展历史
1.2 无人机分类与应用
第二章 无人机系统组成
2.1 机体结构
2.2 飞行控制系统
2.3 动力系统
2.4 通信系统
第三章 飞行原理解析
3.1 空气动力学基础
3.2 飞行控制算法
🎮 第二部分:无人机操作
第四章 操作法规与安全
4.1 国内无人机法规
4.2 飞行安全准则
4.3 责任与保险
第五章 遥控器基本操作
5.1 遥控器结构认识
5.2 无人机飞行操控原理
5.3 遥控器基本操作
5.4进阶操作技巧
第六章 Robomaster TT实战
6.1 TT无人机介绍
6.2 基础操作练习
🖥️ 第三部分:无人机仿真
第七章 仿真技术概述
7.1 仿真的意义与价值
7.2 主流仿真软件对比
第八章 Liftoff模拟器详解
8.1 软件安装与配置
8.2 基本操作学习
8.3 进阶训练项目
第九章 仿真与现实的桥梁
9.1 仿真参数调节
9.2 技能迁移训练
💻 第四部分:无人机编程
第十章 编程基础准备
10.1 编程环境搭建
10.2 无人机通信协议
第十一章 自制无人机平台
11.1 硬件平台介绍
11.2 编程接口详解
11.3 开发环境配置
第十二章 基础编程实践
12.1 简单飞行控制
12.2 传感器数据处理
12.3 自动化任务编程
第十三章 高级编程项目
13.1 计算机视觉应用
13.2 人工智能集成
13.3 创新项目开发
本文档使用 MrDoc 发布
-
+
首页
6.2 基础操作练习
> "从第一次起飞开始,每一次操作都是技能的积累" --- ## 📱 APP连接与设置 ### 🔗 连接准备工作 Robomaster TT通过专用APP“Tello”进行控制,支持iOS和Android双平台。在开始飞行前,需要完成设备连接和基础设置。 **图:Tello APP连接界面** 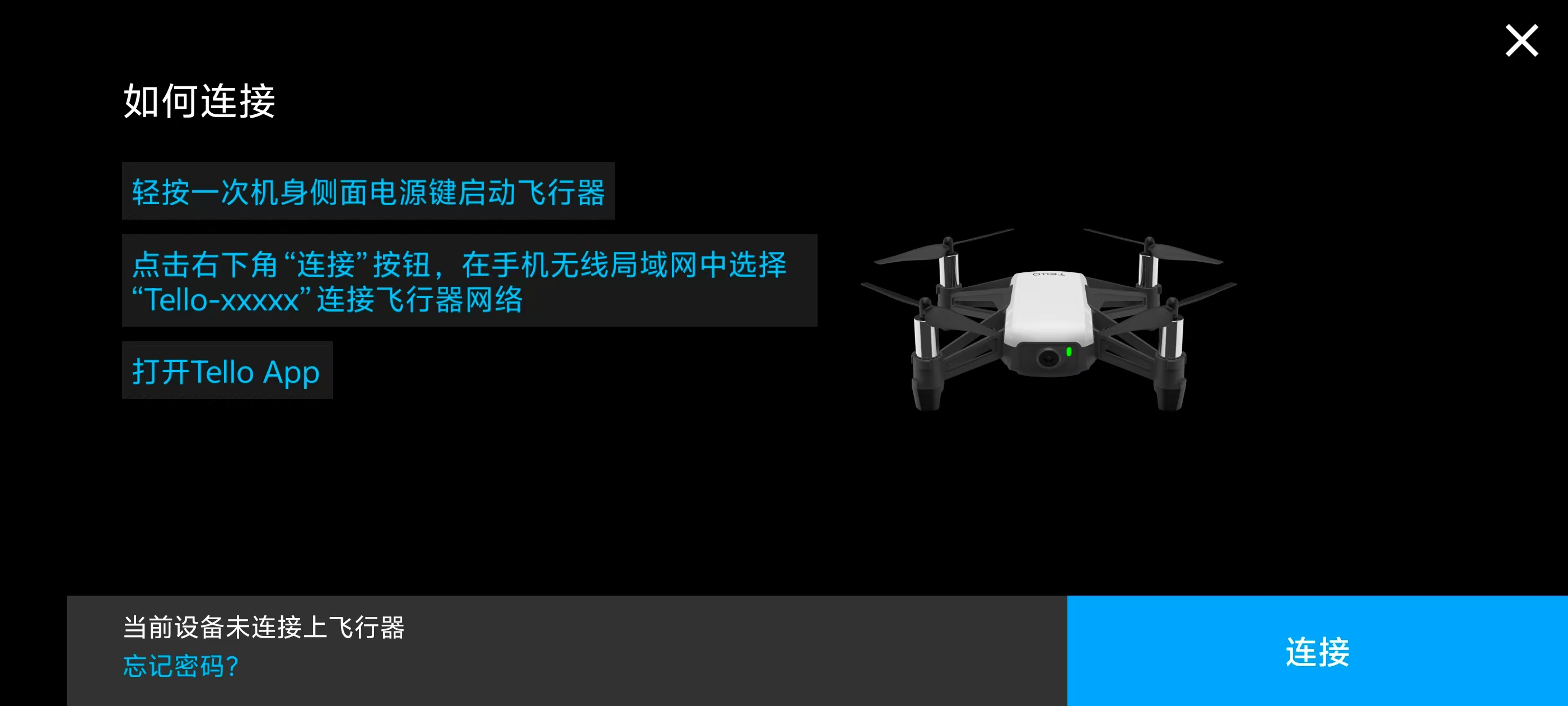 | 连接步骤 | 操作说明 | 注意事项 | 预期结果 | |----------|----------|----------|----------| | 1. 开机准备 | 长按TT电源键3秒 | 确保电池电量>30% | 指示灯呈蓝色闪烁 | | 2. WiFi搜索 | 手机搜索"TELLO-XXXXXX" | XXXXXX为设备序列号 | 发现TT热点信号 | | 3. 网络连接 | 连接TT WiFi热点 | 无需输入密码 | WiFi图标显示已连接 | | 4. APP启动 | 打开APP | 确保APP为最新版本 | 自动识别TT设备 | ### 🛠️ 飞行前检查清单 | 检查项目 | 检查标准 | 异常处理 | |----------|----------|----------| | 电池电量 | ≥50% | 充电至满电再飞行 | | 螺旋桨状态 | 无损坏、安装牢固 | 更换损坏螺旋桨 | | 机身外观 | 无裂痕、无松动 | 检修后再使用 | | 环境条件 | 无风、光线充足 | 选择合适飞行环境 | | 飞行空间 | 3m×3m以上开阔区域 | 清理障碍物 | --- ## 🎮 手动飞行训练 ### 🚀 基础飞行动作 手动飞行是掌握无人机操控的基础,需要循序渐进地练习各种基本动作。 **图:虚拟摇杆控制界面**  #### 摇杆功能分配 | 摇杆位置 | 控制功能 | 操作方向 | 飞行效果 | |----------|----------|----------|----------| | 左摇杆上下 | 油门控制 | 上推/下拉 | 上升/下降 | | 左摇杆左右 | 偏航控制 | 左推/右推 | 逆时针/顺时针旋转 | | 右摇杆上下 | 俯仰控制 | 上推/下拉 | 前进/后退 | | 右摇杆左右 | 横滚控制 | 左推/右推 | 左飞/右飞 | ### 📚 分阶段训练计划 #### 第一阶段:悬停稳定训练 **训练目标**:掌握起飞、悬停、降落的基本操作 ``` 练习步骤: 1. 一键起飞 → 观察TT自动上升到1.2米 2. 保持悬停 → 练习微调摇杆保持位置 3. 高度调节 → 轻推左摇杆上下,体验高度变化 4. 旋转练习 → 轻推左摇杆左右,观察机头方向 5. 一键降落 → 点击降落按钮,观察自动降落过程 ``` **评估标准**: - 能够稳定悬停30秒以上 - 高度控制误差<20cm - 旋转角度控制误差<15° #### 第二阶段:方向移动训练 **训练目标**:掌握前后左右的精确移动控制 | 训练项目 | 操作要求 | 成功标准 | 常见错误 | |----------|----------|----------|----------| | 直线前进 | 右摇杆轻推向前 | 直线距离2米,偏差<30cm | 推杆过猛导致冲撞 | | 直线后退 | 右摇杆轻拉向后 | 直线距离2米,偏差<30cm | 后退时失去方向感 | | 侧向移动 | 右摇杆左右推拉 | 侧移距离1米,偏差<20cm | 侧移时伴随旋转 | | 对角移动 | 摇杆斜向推动 | 45°角移动,轨迹准确 | 角度控制不准确 | ### 🎯 进阶操作技巧 #### 精确定点飞行 | 技巧要点 | 操作方法 | 应用场景 | |----------|----------|----------| | 微调控制 | 摇杆轻推,幅度<30% | 精确定位、拍摄构图 | | 预判补偿 | 提前反向操作 | 惯性补偿、平滑停止 | | 视角切换 | 改变观察角度 | 复杂环境导航 | | 高度层次 | 多层高度飞行 | 3D空间利用 | #### 应急操作处理 ``` 紧急情况处理流程: 1. 失控漂移 → 立即松开所有摇杆 → 等待TT自动稳定 → 重新获得控制 2. 方向迷失 → 点击"机头朝向"按钮 → 观察LED指示灯确认机头 → 调整飞行方向 3. 低电量警告 → 立即执行返航或就近降落 → 避免强制降落造成损坏 4. 信号干扰 → 靠近TT减少距离 → 避开WiFi密集区域 → 重新建立连接 ``` --- ## 📸 拍照录像功能 ### 📷 拍照功能详解 TT搭载的500万像素相机支持高质量静态拍摄,是航拍摄影的入门利器。 **图:相机可选设置**  #### 拍照参数设置 | 参数项目 | 可选值 | 推荐设置 | 适用场景 | |----------|--------|----------|----------| | 图片分辨率 | 5MP/3MP/1MP | 5MP | 高质量拍摄 | | 图片格式 | JPG | JPG | 通用兼容性 | #### 拍摄技巧与构图 **基础构图原则**: ``` 1. 三分法构图 - 将画面分为九宫格 - 主体放在交叉点上 - 地平线放在1/3或2/3位置 2. 对称构图 - 利用建筑物、道路的对称性 - 水面倒影效果 - 几何图案的对称美 3. 引导线构图 - 道路、河流作为引导线 - 引导视线到主体 - 增强画面深度感 ``` ### 🎬 录像功能应用 TT支持HD720P高清录像,可以记录完整的飞行过程和航拍视频。 #### 录像参数配置 | 参数设置 | 选项 | 说明 | 建议 | |----------|------|------|------| | 视频分辨率 | 720P (1280×720) | 固定分辨率 | 标准设置 | | 帧率 | 30fps | 固定帧率 | 流畅播放 | | 视频格式 | MP4 | H.264编码 | 通用格式 | | 码率 | 自动 | 根据场景调整 | 保持默认 | #### 录像拍摄技巧 **运镜手法练习**: | 运镜方式 | 操作方法 | 视觉效果 | 适用场景 | |----------|----------|----------|----------| | 推拉镜头 | 前进/后退移动 | 空间感强烈 | 建筑物、景观 | | 环绕拍摄 | 围绕目标旋转 | 360°全景展示 | 雕塑、建筑 | | 升降镜头 | 垂直上升/下降 | 视角变化丰富 | 揭示性拍摄 | | 侧移跟拍 | 横向移动跟随 | 动态跟踪效果 | 运动目标 | ``` 经典航拍镜头序列: 1. 开场镜头(5秒) - 低空悬停,展示拍摄主体 - 稳定构图,突出主题 2. 上升揭示(10秒) - 缓慢上升,逐渐展现全貌 - 营造空间层次感 3. 环绕展示(15秒) - 围绕主体360°旋转 - 展现不同角度的美感 4. 拉远收尾(8秒) - 后退拉远,形成全景 - 给观众完整印象 ``` ### 📁 媒体文件管理 #### 文件存储与传输 | 存储位置 | 容量限制 | 传输方式 | 传输速度 | |----------|----------|----------|----------| | TT内置存储 | 约100张照片 | WiFi传输 | 2-5MB/s | | 手机本地 | 取决于手机容量 | 实时保存 | 即时 | | 云端备份 | 无限制 | 网络上传 | 取决于网速 | --- ## 🤔 思考与讨论 1. **操作技能进阶**:从手动操作到自动化编程,这个过渡过程中最重要的技能基础是什么?如何确保手动操作的熟练度? 2. **安全意识培养**:在实际操作中,哪些看似简单的操作可能隐藏安全风险?如何建立良好的安全操作习惯? 3. **创意与技术结合**:航拍摄影中,技术操作和艺术创意如何平衡?你认为哪个更重要? 4. **学习方法探讨**:对比理论学习和实践操作,你更倾向于哪种学习方式?如何设计更有效的练习方法? --- <center> <a href="../../doc/29"> <button style="background: linear-gradient(135deg, #6e8efb, #a777e3); border: none; color: white; padding: 15px 32px; text-align: center; text-decoration: none; display: inline-block; font-size: 16px; margin: 4px 2px; cursor: pointer; border-radius: 12px; box-shadow: 0 4px 8px rgba(0,0,0,0.1);">🎮 继续探索第7章:仿真技术概述 🎮</button> </a> </center>
jiangkai
2025年7月29日 11:14
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码